1. 说明
PIBOT底盘驱动板Ardunio Mega2560/STM32F1/STMF32F4与上位机(树莓派/Jetson nano/RK3399等)通过串口通讯
- 通讯数据格式:
- 波特率:
STM32F1/Arduino: 115200, STM32F4:921600
- 起始位: 1 位
- 数据位: 8 位
- 奇偶位: 无
- 停止位: 1 位
2. 硬件板卡通讯协议定义
板卡通讯协议使用串口进行通信,每条消息包含消息头和消息体校验码三部分,所有数字采用小端序传递
2.1 消息定义
每条消息都由 [消息头]+[消息体]+[校验码] 三部分组成,每条消息最大长度为3+255+1字节,消息体最大255字节
|
消息头 |
消息体 |
校验 |
| 大小(字节) |
3 |
N(0-255) |
1 |
2.1.1 消息头
消息头C风格定义如下:
struct head
{
unsigned char flag;// 头部标记,固定帧头:0X5A
unsigned char msg_id;// 消息ID,表示消息具体作用,决定消息体具体格式
unsigned char length;// 消息体长度
}
2.1.2 消息体
消息体为具体数据内容长度由消息头的消息体长度决定
2.1.3 校验码
校验码固定占一个字节空间,为消息头+消息体 每个字节相加得到的结果取低8位的值
3. 消息详细定义
3.1 命令ID
| id |
description |
| 0 |
读取固件版本 |
| 1 |
设置机器人配置参数 |
| 2 |
读取机器人配置参数 |
| 3 |
初始化里程 |
| 4 |
设置机器人实时速度 |
| 5 |
获取里程计信息 |
| 6 |
获取PID调速数据 |
| 7 |
获取IMU数据 |
| 8 |
获取编码器的计数 |
| 9 |
电机控制(调试用) |
3.2 详细消息
- Master:
PC/树莓派等上位机
- Board:
STM32F1/F4/Arduino主板
3.2.1 查询固件版本信息
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x00 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x00 |
0x20 |
具体信息(见下面定义) |
1字节和校验码 |
{
char version[16]; //固件版本
char time[16]; //构建时间
}
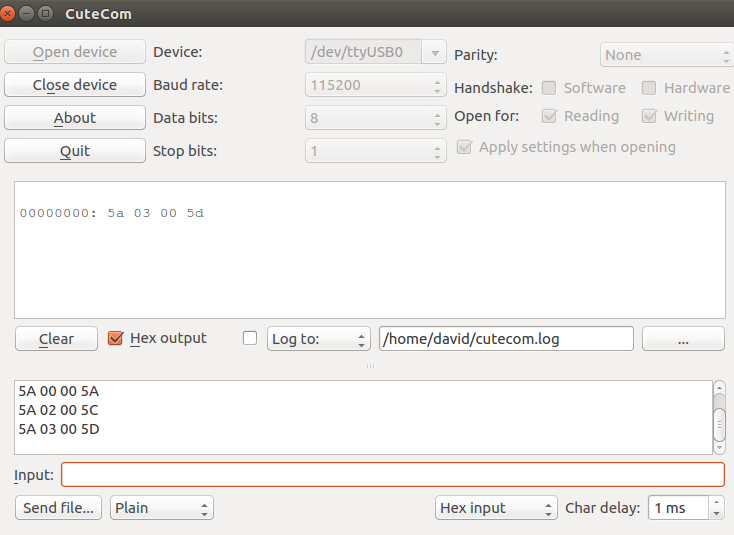
- 交互数据测试
- 发送(十六进制):
5a 00 00 5a
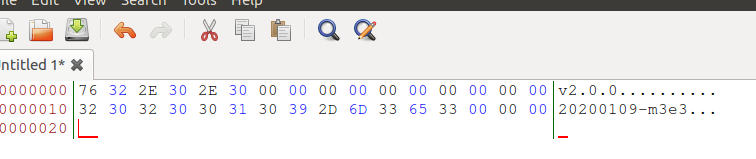
- 接收(十六进制):
5a 00 20 76 32 2e 30 2e 30 00 00 00 00 00 00 00 00 00 00 32 30 32 30 30 31 30 39 2d 6d 33 65 33 00 00 00 d1
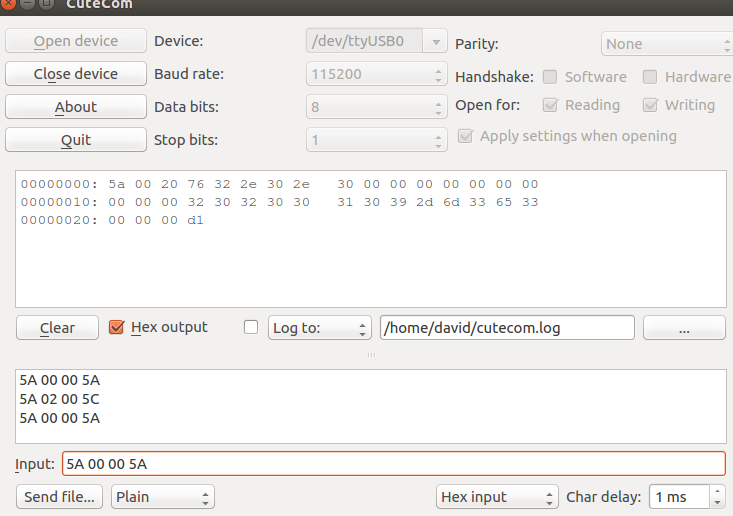
固定帧头:0x5a
消息id:0x00
消息体长度:0x20(32)
消息体:76 32 2e 30 2e 30 00 00 00 00 00 00 00 00 00 00 32 30 32 30 30 31 30 39 2d 6d 33 65 33 00 00 00
校验码: d1
3.2.2 设置机器人配置参数
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x01 |
0x40 |
具体信息(见下面定义) |
1字节和校验码 |
{
union {
char buff[64];
struct
{
unsigned short wheel_diameter; //轮子直径 mm
unsigned short wheel_track; //差分:轮距, 三全向轮:直径,四全向:前后轮距+左右轮距 mm
unsigned short encoder_resolution; //编码器分辨率
unsigned char do_pid_interval; //pid间隔 (ms)
unsigned short kp;
unsigned short ki;
unsigned short kd;
unsigned short ko; //pid参数比例
unsigned short cmd_last_time; //命令持久时间ms 超过该时间会自动停止运动
unsigned short max_v_liner_x; // 最大x线速度
unsigned short max_v_liner_y; // 最大y线速度
unsigned short max_v_angular_z; // 最大角速度
unsigned char imu_type; // imu类型 gy85: 69, gy87:71,gy65:49
unsigned short motor_ratio; // 电机减速比
unsigned char model_type; // 运动模型类型 2wd-diff:1, 4wd-diff:2, 3wd-omni:101, 4wd-omni:102,4wd-mecanum:201
unsigned char motor_nonexchange_flag; // 电机标志参数 1 正接 0 反接(相当于电机线交换)
unsigned char encoder_nonexchange_flag; // 编码器标志参数 1 正接 0 反接(相当于编码器ab相交换)
}
}
}
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x01 |
0x00 |
- |
1字节和校验码 |
3.2.3 读取机器人配置参数
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x02 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x02 |
0x40 |
具体信息(同设置参数的消息体) |
1字节和校验码 |
- 交互数据测试
- 发送(十六进制):
5a 02 00 5c
- 接收(十六进制):
5a 02 40 41 00 af 00 2c 00 0a 40 01 8c 0a 00 00 0a 00 fa 00 32 00 00 00 c8 00 47 5a 00 01 0f 0f 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36 82
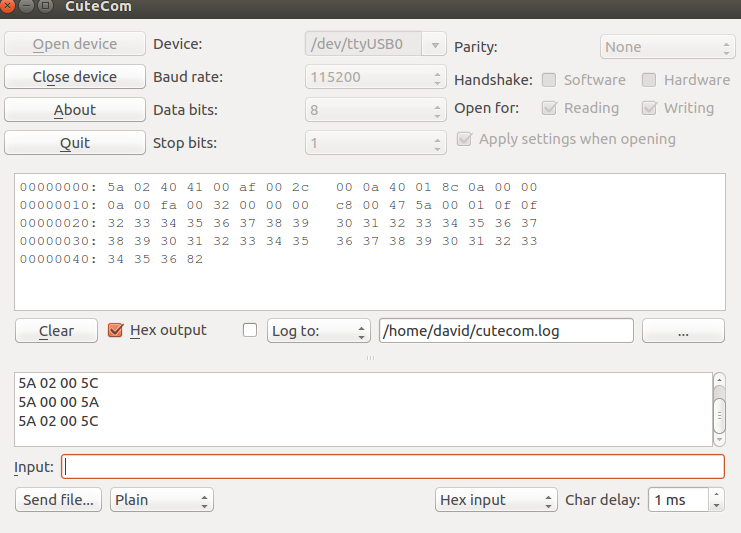
固定帧头:0x5a
消息id:0x02
消息体长度:0x40(64)
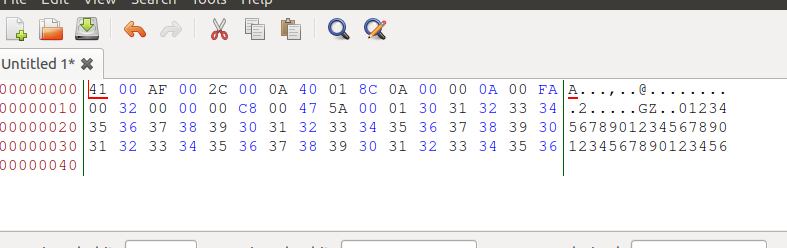
消息体:41 00 af 00 2c 00 0a 40 01 8c 0a 00 00 0a 00 fa 00 32 00 00 00 c8 00 47 5a 00 01 0f 0f 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36 37 38 39 30 31 32 33 34 35 36
校验码: 82
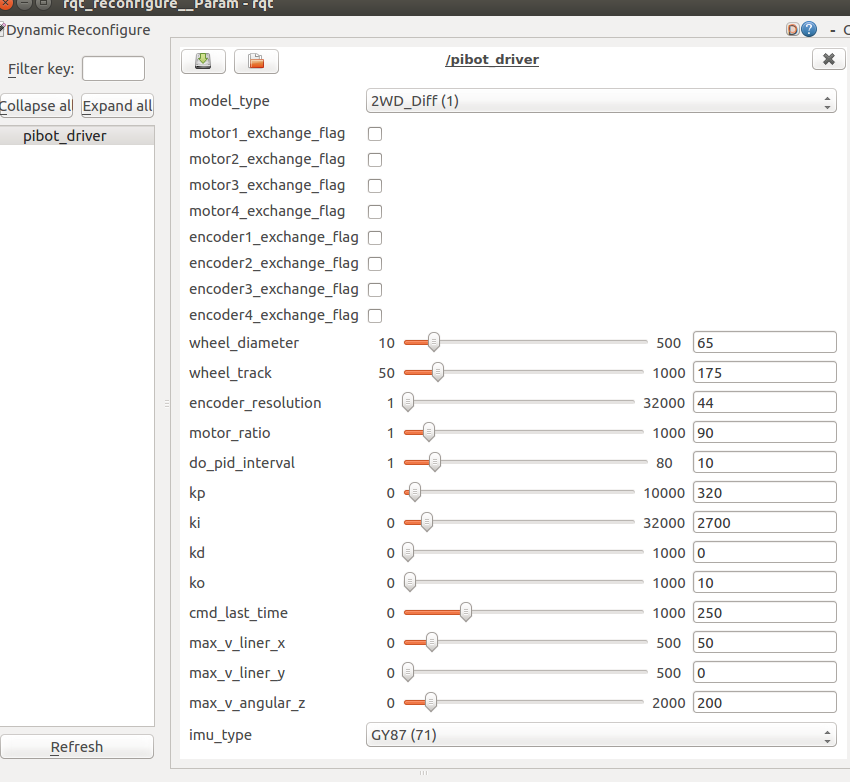
消息体内容对应参数已经pibot_configure命令结果如下:
wheel_diameter=0x0041; // (65mm) //轮子直径 mm
wheel_track=0x00af; // (175mm) //差分:轮距, 三全向轮:直径,四全向:前后轮距+左右轮距 mm
encoder_resolution=0x002c; // 44 //编码器分辨率
do_pid_interval=0x0a; // 10 //pid间隔 (ms)
kp=0x0140; // 320
ki=0x0a8c; // 2700
kd=0x0000; // 0
ko=0x000a; // 0
cmd_last_time=0x00fa;// 250 //命令持久时间ms 超过该时间会自动停止运动
max_v_liner_x=0x0032; // 50 // 最大x线速度
max_v_liner_x=0x0000; // 0 // 最大y线速度
max_v_liner_x=0x00c8;// 200 // 最大角速度
imu_type=0x47; //71 (GY87) // imu类型 参见gy85: 69, gy87:71,gy65:49
motor_ratio=0x005a; //90 // 电机减速比
model_type=0x01; //1(2wd-diff) // 运动模型类型 2wd-diff:1, 4wd-diff:2, 3wd-omni:101, 4wd-omni:102,4wd-mecanum:201
model_type=0x0f; // 0b1111(全部正接) // 电机标志参数 1 正接 0 反接(相当于电机线交换)
encoder_nonexchange_flag=0x0f; // 0b1111(全部正接) // 编码器标志参数 1 正接 0 反接(相当于编码
3.2.4 初始化里程
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x03 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x03 |
0x00 |
- |
1字节和校验码 |
 |
|
|
|
|
|
3.2.5 设置机器人实时速度
设置机器人速度为激励模式, 即需要一直发送,超过设定时间未接收到该命令,机器人会自动停止
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x04 |
0x06 |
速度(见下面定义) |
1字节和校验码 |
| ```C |
|
|
|
|
|
| { |
|
|
|
|
|
| short v_liner_x; //线速度 前>0 cm/s |
|
|
|
|
|
| short v_liner_y; //差分轮 为0 cm/s |
|
|
|
|
|
| short v_angular_z; //角速度 左>0 0.01rad/s 100 means 1 rad/s |
|
|
|
|
|
| } |
|
|
|
|
|
| ``` |
|
|
|
|
|
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x04 |
0x00 |
- |
1字节和校验码 |
- 交互数据测试
- 发送(十六进制):
5a 04 06 14 00 00 00 00 00 78
- 接收(十六进制):
5a 04 00 5e
v_liner_x=0x0014; //20cm/s 0.2m/s //线速度 前>0 cm/s
v_liner_y=0x0000; //0cm/s //线速度 前>0 cm/s
v_angular_z=0x0000; //0rad/s //角速度 左>0 0.01rad/s 100 means 1 rad/s
3.2.6 获取里程计信息
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x05 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x05 |
0x10 |
里程计信息(见下面说明) |
1字节和校验码 |
| ```C |
|
|
|
|
|
| { |
|
|
|
|
|
| short v_liner_x; //线速度 前>0 后<0 cm/s |
|
|
|
|
|
| short v_liner_y; //差分轮 为0 cm/s |
|
|
|
|
|
| short v_angular_z; //角速度 左>0 右<0 0.01rad/s 100 means 1 rad/s |
|
|
|
|
|
| long x; //里程计坐标x cm (这里long为4字节,下同) |
|
|
|
|
|
| long y; //里程计坐标y cm |
|
|
|
|
|
| short yaw; //里程计航角 0.01rad 100 means 1 rad |
|
|
|
|
|
| } |
|
|
|
|
|
| ``` |
|
|
|
|
|
- 交互数据测试
- 发送(十六进制):
5a 05 00 5f
- 接收(十六进制):
5a 05 10 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 6f
固定帧头:0x5a
消息id:0x05
消息体长度:0x10(2+2+2+4+4+2=16)
消息体:00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 //初始化后全为0
校验码: 6f
3.2.7 获取PID调速数据
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x06 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x06 |
0x20 |
PID信息(见下面说明) |
1字节和校验码 |
{
long input[4]; //各轮子驱动输入值
long output[4]; //个轮子输出值
}
3.2.8 获取IMU数据
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x07 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x07 |
0x24 |
9轴IMU信息(见下面说明) |
1字节和校验码 |
{
float ax, ay, az; // 三轴加速度计值 m/s2
float gx, gy, gz;// 三轴陀螺仪计值 rad/s
float mx, my, mz;// 三轴磁力计计值mg(0.001GAUSS)
}
- 交互数据测试
- 发送(十六进制):
5A 07 00 61
- 接收(十六进制):
5a 07 24 49 32 8e 3d 4e a6 5c 3e 1e fc 12 41 58 a0 0b 3c 7e b6 c8 bc 58 a0 8b bb e1 7a 04 c2 8f 42 81 43 7b 94 94 c3 17
固定帧头:0x5a
消息id:0x07
消息体长度:0x24(4*9=36)
消息体:49 32 8e 3d 4e a6 5c 3e 1e fc 12 41 58 a0 0b 3c 7e b6 c8 bc 58 a0 8b bb e1 7a 04 c2 8f 42 81 43 7b 94 94 c3
校验码: 17
// 三轴加速度计值 m/s2
ax=[49 32 8e 3d] // 0.0694318488
ay=[4E A6 5C 3E] // 0.215478152
az=[1E FC 12 41] // 9.18655205
// 三轴陀螺仪计值 rad/s
gx=[58 A0 0B 3C] // 0.00852211565
gy=[7E B6 C8 BC] // -0.0245010816
gz=[58 A0 8B BB] // -0.00426105782
// 三轴磁力计计值mg(0.001GAUSS)
mx=[E1 7A 04 C2] // -33.1199989
my=[8F 42 81 43] // 258.519989
mz=[7B 94 94 C3] // -297.160004
3.2.9 获取编码器的计数数据
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x08 |
0x00 |
- |
1字节和校验码 |
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x08 |
0x10 |
编码器计数(见下面说明) |
1字节和校验码 |
{
float encoder_count[4]; // 各电机编码器计数
}
3.2.10 电机控制
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x09 |
pwm(见下面说明) |
- |
1字节和校验码 |
{
short pwm[4]; // 各输出控制电机的pwm
}
|
固定帧头 |
id |
消息体长度 |
消息体 |
校验 |
| 内容 |
0x5a |
0x09 |
0x00 |
- |
1字节和校验码 |