|
|
||
|---|---|---|
| .. | ||
| image | ||
| README.md | ||
README.md
Meeting
2024.04.17
1、全覆盖出现问题
解决方法:采用log存储运行文件
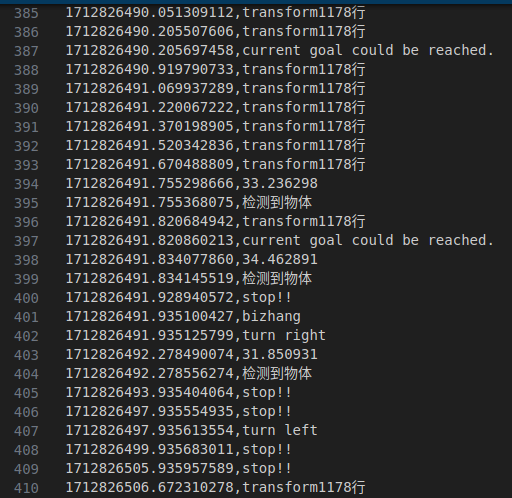
void sendNavigation(vector<loc> pos){
do{
if(与目标点的距离判断<=eps^2)
near_pose=true;
}while(判断条件)
}
以前设置eps为0。
解决方案:1、增大eps的值测试效果
2、增加其他判断条件跳出循环
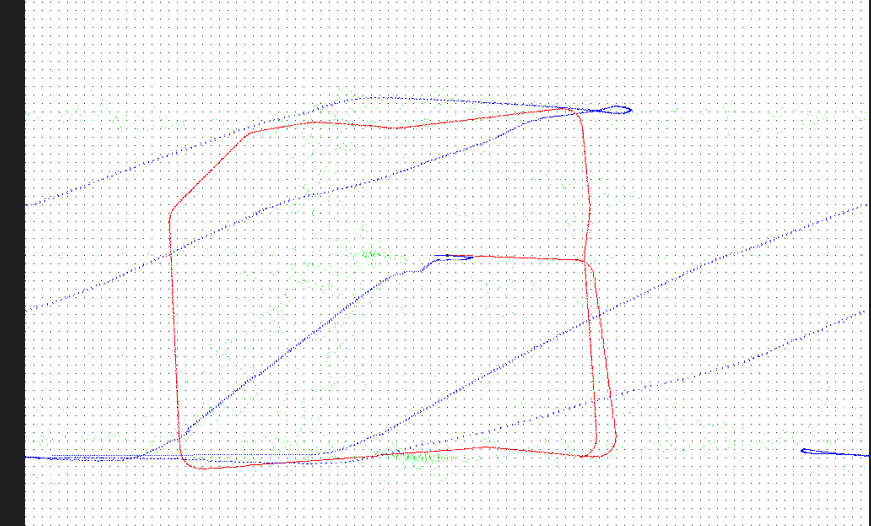
2、摄像头避障问题
实验确定了是全覆盖的策略导致的避障不及时问题。 需要额外增加合适的标志位打断原先的全覆盖逻辑,进入避障的逻辑。
已解决。
添加新的避障条件,并通过多次全覆盖实验验证其作用,检测到目标的情况下能及时避障,并录相关视频。
3、定位UWB出现问题
测距错误,导致解算的定位结果错误,最后导致全覆盖运行失败。
已解决。
下周安排
1、继续测试全覆盖稳定性
2、uwb三维解算移植