From 69cea1b04321c06e409d701f72dd28eba2ed2300 Mon Sep 17 00:00:00 2001
From: zhanli <719901725@qq.com>
Date: Wed, 13 Dec 2023 18:00:21 +0800
Subject: [PATCH] =?UTF-8?q?=E6=9B=B4=E6=96=B0=E6=96=87=E6=A1=A3?=
MIME-Version: 1.0
Content-Type: text/plain; charset=UTF-8
Content-Transfer-Encoding: 8bit
---
Code/RK3588/PIBot_ROS.md | 59 +++++++
Code/RK3588/PIBot_ROS/README.md | 3 +-
.../src/ros_merge_test/CMakeLists.txt | 10 +-
.../src/ros_merge_test/include/avoid.h | 0
.../src/ros_merge_test/include/mapping.h | 3 -
.../ros_merge_test/include/read_sensor_data.h | 34 ----
.../src/ros_merge_test/include/system.h | 31 ----
.../src/ros_merge_test/include/uwb.h | 56 +++----
.../src/ros_merge_test/src/align.cpp | 146 +++++++++---------
.../src/ros_merge_test/src/main.cpp | 22 +--
.../src/ros_merge_test/src/mapping.cpp | 31 +---
.../ros_merge_test/src/read_sensor_data.cpp | 33 ----
.../src/ros_merge_test/src/system.cpp | 10 --
.../src/ros_merge_test/src/uwb.cpp | 48 +++---
Docs/ROS基础之基本函数.md | 18 +++
Docs/ROS基础之基本命令.md | 33 ++++
16 files changed, 230 insertions(+), 307 deletions(-)
create mode 100644 Code/RK3588/PIBot_ROS.md
delete mode 100644 Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/avoid.h
delete mode 100644 Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h
delete mode 100644 Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h
delete mode 100644 Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp
delete mode 100644 Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp
create mode 100644 Docs/ROS基础之基本函数.md
create mode 100644 Docs/ROS基础之基本命令.md
diff --git a/Code/RK3588/PIBot_ROS.md b/Code/RK3588/PIBot_ROS.md
new file mode 100644
index 0000000..37dcede
--- /dev/null
+++ b/Code/RK3588/PIBot_ROS.md
@@ -0,0 +1,59 @@
+# `PIBot_ROS`说明
+
+> 更新:`zhanli` 2023-12-13
+
+### 一、`PIBot_ROS`简介
+
+ `PIBot_ROS`本质上一个封装功能非常完善的功能包,其内部添加了许多已经整合好了功能,更加便于使用。
+
+- `ros_package` : 内置了许多算法的功能包的压缩包
+- `pypibot` : `pibot`相关的python支持功能
+- `pibot_upstart` : 未知待补充
+- `ros_ws` : `ROS`的工作空间
+
+##### 1.1 `ros_ws`的目录结构
+
+ 下图中`catkin_workspcae`对应即是`ros_ws`文件夹。其下面一般具有`src`、`build`、`devel`等功能。
+
+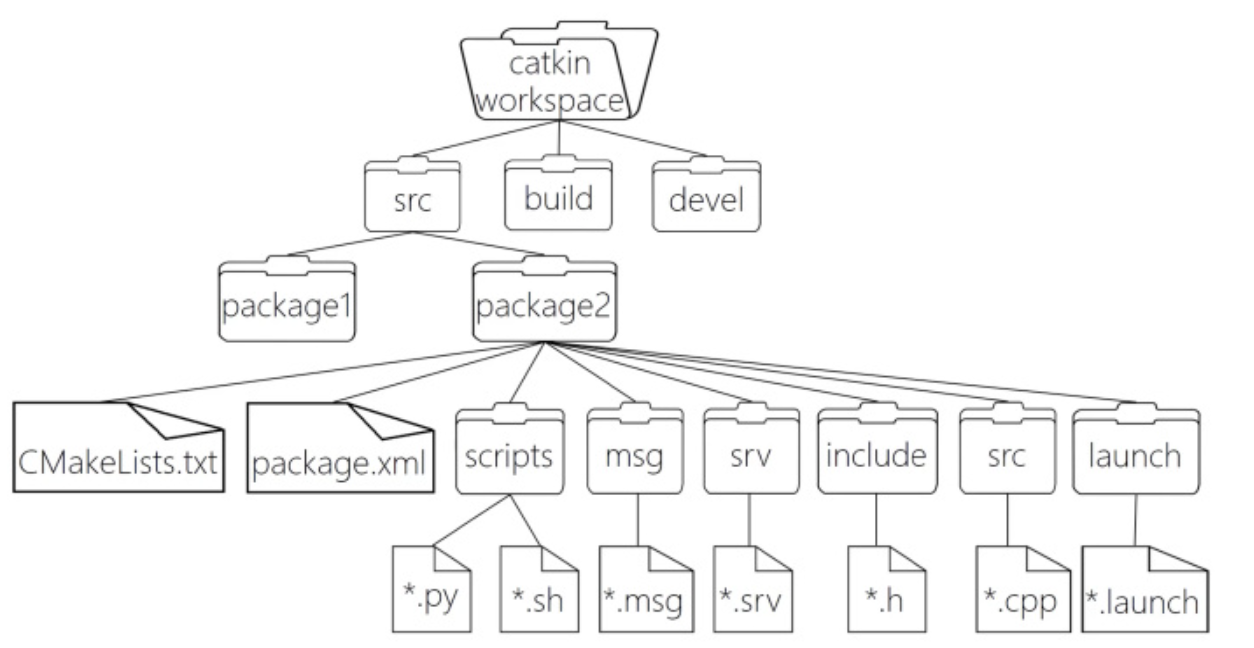 +
+ 上述文件的结构和说明如下面的文档所示:
+
+```shell
+WorkSpace --- 自定义的工作空间
+ |--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
+ |--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
+ |--- src: 源码
+ |-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
+ |-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
+ |-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
+ |-- scripts 存储python文件
+ |-- src 存储C++源文件
+ |-- include 头文件
+ |-- msg 消息通信格式文件
+ |-- srv 服务通信格式文件
+ |-- action 动作格式文件
+ |-- launch 可一次性运行多个节点
+ |-- config 配置信息
+ |-- CMakeLists.txt: 编译的基本配置
+```
+
+##### 1.2 `package.xml`
+
+ 如上图所示,ROS的基本功能都是通过包(`package`)组织的。该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。请注意,该概念类似于旧版` rosbuild` 构建系统中使用的`manifest.xml`文件。
+
+ `package.xml`的部分内容如下图所示, 推测ROS系统通过`package.xml`的内容识别对应包的功能命令。
+
+```xml
+
+
+
+
+ demo01_hello_vscode
+
+ 0.0.0
+
+ ...
+
+```
+
diff --git a/Code/RK3588/PIBot_ROS/README.md b/Code/RK3588/PIBot_ROS/README.md
index 70ab732..e35b7fb 100644
--- a/Code/RK3588/PIBot_ROS/README.md
+++ b/Code/RK3588/PIBot_ROS/README.md
@@ -56,7 +56,7 @@ sudo apt-get install coinor-*
#### 3.1 导航的启动
- `PIBot_ROS`的文件解压或重新命名可以按照个人习惯即可,这里以解压后命名为`pibot_ros`为例,介绍命令启动导航
+ `PIBot_ROS`的文件解压或重新命名可以按照个人习惯即可,这里以解压后命名为`pibot_ros`为例,介绍命令启动导航。
```shell
# 进入到pibot_ros的工作空间
@@ -64,6 +64,7 @@ cd ~/pibot_ros/ros_ws
# 配置环境变量
source ./devel/setup.bash
# 启动导航文件
+# 格式 roslaunch package_name launch_file_name
roslaunch pibot_navigation nav.launch
```
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
index f131752..668049f 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
@@ -22,28 +22,24 @@ find_package(Boost REQUIRED)
# CATKIN_DEPENDS message_runtime std_msgs geometry_msgs
# )
-
include_directories(
# include
- ${OpenCV_INCLUDE_DIRS}
- ${catkin_INCLUDE_DIRS}
+${OpenCV_INCLUDE_DIRS}
+${catkin_INCLUDE_DIRS}
include
)
add_library(${PROJECT_NAME} SHARED
- src/system.cpp
src/uwb.cpp
src/mapping.cpp
src/align.cpp
- # src/read_sensor_data.cpp
include/senddata.h src/senddata.cpp)
add_message_files(
DIRECTORY msg
FILES
- RawImu.msg
-
+ RawImu.msg
)
generate_messages(DEPENDENCIES std_msgs geometry_msgs)
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/avoid.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/avoid.h
deleted file mode 100644
index e69de29..0000000
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
index e4bccc4..dcb928a 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
@@ -6,7 +6,6 @@
#ifndef MAPPING_H
#define MAPPING_H
-
namespace uwb_slam{
class Mapping
{
@@ -26,9 +25,7 @@ namespace uwb_slam{
bool read_uwb_ = false;
cv::Mat img;
cv::Point2d cur_point = {-1,-1};
-
};
-
}
#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h
deleted file mode 100644
index 39c7430..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h
+++ /dev/null
@@ -1,34 +0,0 @@
-#include
-#include "nav_msgs/Odometry.h"
-#include "geometry_msgs/Twist.h"
-#include "sensor_msgs/Imu.h"
-#include "geometry_msgs/PoseStamped.h"
-#include "geometry_msgs/PoseWithCovarianceStamped.h"
-#include
-#include "type.h"
-#include "uwb.h"
-
-
-#ifndef READ_SENSOR_DATA_H
-#define READ_SENSOR_DATA_H
-
-namespace uwb_slam{
- typedef boost::shared_ptr OdomConstPtr;
- typedef boost::shared_ptr ImuConstPtr;
- class ReadSensorData
- {
- public:
- ReadSensorData();
-
- void Run(int argc, char* argv[]);
- //void set_uwb(Uwb * uwb);
- void imu_call_back(const ImuConstPtr& imu);
- void odom_call_back(const OdomConstPtr& odom);
-
- private:
- ros::Subscriber imu_sub_;
- ros::Subscriber odom_sub_;
-
- };
-}
-#endif
\ No newline at end of file
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h
deleted file mode 100644
index b0c5f85..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h
+++ /dev/null
@@ -1,31 +0,0 @@
-#ifndef SYSTEM_H
-#define SYSTEM_H
-
-#include
-#include
-#include "mapping.h"
-#include "uwb.h"
-#include "senddata.h"
-#include "align.h"
-#include
-
-namespace uwb_slam{
- class System{
-
- public:
- System() {
- }
- void Run();
- public:
-
- std::shared_ptr Mapping_;
- std::shared_ptr Uwb_;
- std::shared_ptr Sender_;
- std::shared_ptr Align_;
-
- // Uwb* Uwb_ ;
- // Senddata* Sender_;
- // Mapping* Mapping_;
- };
-}
-#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
index 22fefb9..5754498 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
@@ -7,48 +7,30 @@
#include "type.h"
#include
#include
-#ifndef UWB_H
-#define UWB_H
+#ifndef __UWB_H__
+#define __UWB_H__
namespace uwb_slam{
- class Uwb
- {
- public:
- Uwb();
- void Run();
- bool checknewdata();
- void feed_imu_odom_pose_data();
- void UartUSBRead();
+class Uwb
+{
+public:
+ Uwb();
+ void Run();
+ bool checknewdata();
+ void feed_imu_odom_pose_data();
+ void UartUSBRead();
-
-
- public:
- int pre_seq = -1;
- int cur_seq = -1;
- uint8_t tmpdata[13];
- float x, y, theta, distance;
-
- // std::queue v_buffer_imu_odom_pose_data_;
-
-
- Uwb_data uwb_data_;
- // ros_merge_test::RawImu sub_imu_;
- // std::queue imu_odom_queue_;
- // std::queue uwb_data_queue_;
- std::mutex mMutexUwb;
- //boost::asio::io_service io;
- //boost::asio::serial_port s_port;
-
- // Imu_odom_pose_data imu_odom_pose_data_;
- };
-
+public:
+ int pre_seq = -1;
+ int cur_seq = -1;
+ uint8_t tmpdata[13];
+ float x, y, theta, distance;
+
+ Uwb_data uwb_data_;
+ std::mutex mMutexUwb;
+};
};
-
-
-
-
-
#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
index 6bba774..73d8d1d 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
@@ -14,86 +14,86 @@ namespace uwb_slam{
ros::Time tmp1 = ros::Time::now();
ros::Time tmp2 = ros::Time::now();
-
+ // 这个地方分别订阅了原始IMU、轮式里程计、里程计(推测是UWB)
wheel_odom_sub_= nh_.subscribe("wheel_odom",10,&Align::wheel_odomCB,this);
- imu_sub_= nh_.subscribe("raw_imu",10,&Align::imuCB,this);
- odom_sub_= nh_.subscribe("odom",10,&Align::odomCB,this);
+ imu_sub_ = nh_.subscribe("raw_imu",10,&Align::imuCB,this);
+ odom_sub_ = nh_.subscribe("odom",10,&Align::odomCB,this);
std::ofstream outfile("data.txt",std::ofstream::out);
if(outfile.is_open())
{
- img1 = cv::Mat(200, 200, CV_8UC1, cv::Scalar(255,255,255));
- cv::imshow("Image1",img1);
- int key2 = cv::waitKey(0);
- // if(key2 =='w'){
- // bool write_data_ = true;
- // }
-
- // int count=0;
- // while(write_data_){
- while(1){
-
- int key3 = cv::waitKey(1);
- if(key3 == 'w'){
- break;
- }
- if(tmp!=imu_odom_.imu_data_.imu_t_){
- // outfile <<"imu_odom_: "<< "imu_timestamp "<<"imu_linear_acc_x_y_z "<<"imu_angular_x_y_z "<<
- // "odom_vxy "<<"odom_angle_v_ "<<"\n";
- // if(tmp1!=uwb_->uwb_data_.uwb_t_&& tmp2!=odom_tmp_){
- outfile << std::left << std::setw(12)<<"imu_odom_: "<< std::setw(10)<< imu_odom_.imu_data_.imu_t_.sec << '.' <uwb_data_.uwb_t_-tmp1).sec<<'.'<uwb_data_.uwb_t_-tmp1).nsec << std::setw(9)
- <uwb_data_.x_ << std::setw(9)<uwb_data_.y_<<"\n";
- tmp1 = uwb_->uwb_data_.uwb_t_;
- tmp2 = odom_tmp_;
- // }
- // else if(tmp1!=uwb_->uwb_data_.uwb_t_){
- // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
- // <uwb_data_.uwb_t_<<"*"<uwb_data_.x_<<"*"<uwb_data_.y_<<"\n";
- // tmp1 = uwb_->uwb_data_.uwb_t_;
- // }
- // else if(tmp2!=odom_tmp_){
- // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
- // <uwb_data_.uwb_t_;
-
- // if(count>300)
- // break;
- }
+ img1 = cv::Mat(200, 200, CV_8UC1, cv::Scalar(255,255,255));
+ cv::imshow("Image1", img1);
+ int key2 = cv::waitKey(0);
+ // if(key2 =='w'){
+ // bool write_data_ = true;
+ // }
- }
+ // int count=0;
+ // while(write_data_){
+ while(1){
- outfile.close();
- std::cout<< "Data written to file." << std::endl;
+ int key3 = cv::waitKey(1);
+ if(key3 == 'w'){
+ break;
+ }
+ if(tmp!=imu_odom_.imu_data_.imu_t_)
+ {
+ // outfile <<"imu_odom_: "<< "imu_timestamp "<<"imu_linear_acc_x_y_z "<<"imu_angular_x_y_z "<<
+ // "odom_vxy "<<"odom_angle_v_ "<<"\n";
+ // if(tmp1!=uwb_->uwb_data_.uwb_t_&& tmp2!=odom_tmp_){
+ outfile << std::left << std::setw(12)<<"imu_odom_: "<< std::setw(10)<< imu_odom_.imu_data_.imu_t_.sec << '.' <uwb_data_.uwb_t_-tmp1).sec<<'.'<uwb_data_.uwb_t_-tmp1).nsec << std::setw(9)
+ <uwb_data_.x_ << std::setw(9)<uwb_data_.y_<<"\n";
+ tmp1 = uwb_->uwb_data_.uwb_t_;
+ tmp2 = odom_tmp_;
+ // }
+ // else if(tmp1!=uwb_->uwb_data_.uwb_t_){
+ // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
+ // <uwb_data_.uwb_t_<<"*"<uwb_data_.x_<<"*"<uwb_data_.y_<<"\n";
+ // tmp1 = uwb_->uwb_data_.uwb_t_;
+ // }
+ // else if(tmp2!=odom_tmp_){
+ // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
+ // <uwb_data_.uwb_t_;
+
+ // if(count>300)
+ // break;
+ }
+ }
+
+ outfile.close();
+ std::cout<< "Data written to file." << std::endl;
}
else{
std::cout<<"file can not open"< system = std::make_shared();
std::shared_ptr mp = std::make_shared();
std::shared_ptr uwb = std::make_shared();
std::shared_ptr sender = std::make_shared();
std::shared_ptr align = std::make_shared();
-
- // uwb_slam::System* system = new uwb_slam::System();
- // uwb_slam::Mapping* mp = new uwb_slam::Mapping();
- // uwb_slam::Uwb* uwb = new uwb_slam::Uwb();
- // uwb_slam::Senddata* sender = new uwb_slam::Senddata();
- system->Mapping_ = mp;
- system->Mapping_->uwb_ = uwb;
- system->Uwb_ = uwb;
- system->Sender_ = sender;
- system->Align_ = align;
-
- mp->uwb_ = system->Uwb_;
- align->uwb_ = system->Uwb_;
+ mp->uwb_ = uwb;
+ align->uwb_ = uwb;
-
- // control data fllow in system
- std::thread rose_trd([&system]() {
- system->Run();
- });
// uwb serried read
std::thread uwb_trd([&uwb]() {
uwb->Run();
@@ -67,5 +50,4 @@ int main(int argc, char** argv)
// Start the ROS node's main loop
ros::spin();
- //System->run()
}
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
index 9f9ddc2..a277f48 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
@@ -40,10 +40,7 @@ namespace uwb_slam
void Mapping::Run()
{
-
- //int key = cv::waitKey(0);//等待用户按下按键
- //std::cout << key << std::endl;
- int realWidth = AREA_SIZE / PIXEL_SCALE;
+ int realWidth = AREA_SIZE / PIXEL_SCALE;
int realHeight = AREA_SIZE / PIXEL_SCALE;
img = cv::Mat(realHeight, realWidth, CV_8UC1, cv::Scalar(255,255,255));
@@ -56,20 +53,8 @@ namespace uwb_slam
for (int i=199+8;i<210;i+=1)
img.at(j,i)= 0;
-
-
cv::imshow("Image",img);
- /*
- std::cout << "waiting" <feed_uwb_data(cv::Point2d(uwb_->x,uwb_->y));
- read_uwb_ = true;
- std::cout << "non" << key << std::endl;
- cv::destroyAllWindows();
- }
- */
while(1)
{
// 这个地方会持续阻塞
@@ -94,23 +79,11 @@ namespace uwb_slam
this->feed_uwb_data(cv::Point2d(uwb_->x ,uwb_->y));
-
- //uwb xieru
- //std::cout << "cur_SEQ: " <cur_seq << std::endl;
-
- if(check_uwb_point())
- {
- //std::cout << " start process" << std::endl;
+ if(check_uwb_point()){
process();
- //std::cout << " end process" << std::endl;
}
}
- // std::cout << "out" << key << std::endl;
}
- //std::string pngimage="../Map/pngimage.png";//保存的图片文件路径
- //cv::imwrite(pngimage,img);
-
- /*ros 发送图片给导航 */
}
} // namespace uwb_slam
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp
deleted file mode 100644
index 34bd9ee..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp
+++ /dev/null
@@ -1,33 +0,0 @@
-#include
-
-namespace uwb_slam {
-
-
- //void Read_sensor_data::set_uwb(){}
-
-
- void ReadSensorData::imu_call_back(const ImuConstPtr& imu){
- Imu_data d1= Imu_data(imu->linear_acceleration.x,imu->linear_acceleration.y,imu->linear_acceleration.z,
- imu->angular_velocity.x,imu->angular_velocity.y,imu->angular_velocity.z);
-
- }
- void ReadSensorData::odom_call_back(const OdomConstPtr& odom){
- Odom_data d1 = Odom_data(odom->pose.pose.position.x, odom->pose.pose.position.y, odom->pose.pose.position.z,
- odom->pose.pose.orientation.w,odom->pose.pose.orientation.x, odom->pose.pose.orientation.y, odom->pose.pose.orientation.z,
- odom->header.stamp,odom->twist.twist.linear.x,odom->twist.twist.linear.y,odom->twist.twist.angular.z);
-
- }
- void ReadSensorData::Run(int argc, char* argv[]){
-
- ros::init(argc, argv, "imu_odom");
- // 创建一个节点句柄
- ros::NodeHandle nh;
-
- //imu_sub_ = nh.subscribe("imu/data_raw", 1000, this->imu_call_back);
- //odom_sub_ = nh.subscribe("odom", 1000, odom_call_back);
-
- // 运行ROS事件循环
- ros::spin();
- }
-
-}
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp
deleted file mode 100644
index 12eb8ad..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp
+++ /dev/null
@@ -1,10 +0,0 @@
-#include "../include/system.h"
-
-namespace uwb_slam{
-
- void System::Run()
- {
- while(1){
- }
- }
-}
\ No newline at end of file
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
index b3cd31e..c2f8fc7 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
@@ -2,7 +2,9 @@
* File Name : uwb.cpp
* Current Version : V1.0
* Date of Issued : 2023.12.13 zhanli@review
-* Comments : UWB数据驱动, 负责从串口读取USB并发布出去
+* Comments : UWB数据驱动, 负责从串口读取USB并发布出去,这个代码可能存在以下
+ 改进:1) 创建固定的串口读取对象serial_port 2) 修改代码为异步
+ 读取。3) 确认串口数据的长度
********************************************************************************/
#include "uwb.h"
#include
@@ -18,16 +20,22 @@ namespace uwb_slam{
void Uwb::Run() {
while(1){
// 这个地方不控制速率?
+ // UartUSBRead 这个地方本身就是同步读取串口,是阻塞的函数
this->UartUSBRead();
}
}
-
+ /**---------------------------------------------------------------------
+ * Function : UartUSBRead
+ * Description : 通过串口读取数据,目前这段代码存在部分问题:1) 每次都重复创建
+ * 串口读取对象,可能会影响性能。
+ * Date : 2023/12/13 zhanli@review
+ *---------------------------------------------------------------------**/
void Uwb::UartUSBRead()
{
try {
boost::asio::io_service io;
- boost::asio::serial_port serial(io, "/dev/ttyUSB0"); // 替换成你的串口设备路径
+ boost::asio::serial_port serial(io, "/dev/ttyUSB0"); // 替换成你的串口设备路径
serial.set_option(boost::asio::serial_port_base::baud_rate(115200)); // 设置波特率
serial.set_option(boost::asio::serial_port_base::character_size(8)); // 设置数据位
@@ -35,33 +43,19 @@ namespace uwb_slam{
serial.set_option(boost::asio::serial_port_base::stop_bits(boost::asio::serial_port_base::stop_bits::one)); // 设置停止位
uint8_t tmpdata[12];
-
- size_t bytesRead = boost::asio::read(serial, boost::asio::buffer(tmpdata, 12)); // 读取串口数据
- // std::cerr << "after read" << std::endl;
+ // 读取串口数据
+ size_t bytesRead = boost::asio::read(serial, boost::asio::buffer(tmpdata, 12));
- // for (int i=0;i< bytesRead;i++)
- // {
- // std::cout << "Received data: " << std::hex<(tmpdata[i]) ;
- // }
+ // UWB获取的数据是半径R和角度Theta
memcpy(&this->distance, &tmpdata[3], sizeof(distance));
memcpy(&this->theta, &tmpdata[7], sizeof(theta));
- /*this->x = cosf(theta/180*PI)*distance+1000;
- this->y = sinf(theta/180*PI)*distance+1000;
- this->theta = theta;*/
- this->uwb_data_.x_ = cosf(theta/180*PI)*distance+1000;
- this->uwb_data_.y_ = sinf(theta/180*PI)*distance+1000;
+
+ // 这个地方是为了把UWB的坐标移动到图像的中心位置 2023/12/13@李瑞瑞
+ this->uwb_data_.x_ = cosf(theta / 180*PI)*distance + 1000;
+ this->uwb_data_.y_ = sinf(theta / 180*PI)*distance + 1000;
+ // 获取此时的系统时间戳
this->uwb_data_.uwb_t_ = ros::Time::now();
- // uwb_data_queue_.push(uwb_data_);
-
- //std::cout << "uwb_data_: " << uwb_data_.uwb_t_<< std::endl;
- // cur_seq = static_cast(tmpdata[3]);
- //std::cout << "****** cur _ sequence: " << cur_seq << "x: " << x << " y: " << y <(tmpdata[3]);
-
std::cout << "theta: " << theta << " distance: " << distance << std::endl;
} catch (const std::exception& ex) {
@@ -69,10 +63,6 @@ namespace uwb_slam{
<< ex.what() << std::endl;
}
}
-
- void fusion()
- {
- }
};
diff --git a/Docs/ROS基础之基本函数.md b/Docs/ROS基础之基本函数.md
new file mode 100644
index 0000000..d073183
--- /dev/null
+++ b/Docs/ROS基础之基本函数.md
@@ -0,0 +1,18 @@
+# ROS基础笔记
+
+##### 1.1 `ros::Rate`的用法
+
+ `ros::Rate` 是ROS中用于控制循环频率的工具。在你提到的代码中,`ros::Rate loop_rate(10);` 创建了一个 `ros::Rate` 对象,其目的是控制循环的频率。
+
+```c++
+ros::Rate loop_rate(10); // 设置事件循环的频率为10Hz
+
+while (ros::ok()) {
+ // 处理其他任务,这个地方不能处理过于耗时的操作
+
+ ros::spinOnce(); // 处理一次事件循环
+ loop_rate.sleep(); // 使节点等待足够的时间以达到设定的频率
+}
+
+```
+
diff --git a/Docs/ROS基础之基本命令.md b/Docs/ROS基础之基本命令.md
new file mode 100644
index 0000000..4f89249
--- /dev/null
+++ b/Docs/ROS基础之基本命令.md
@@ -0,0 +1,33 @@
+# ROS基础之基础命令
+
+> https://blog.csdn.net/sinat_16643223/article/details/113935412
+
+## 一、常用命令
+
+##### 1.1 `catkin_make`编译命令
+
+```shell
+# 进入工作空间
+cd ros_ws
+# 编译
+catkin_make
+```
+
+ 我们在使用ROS的时候经常会使用`catkin_make`命令,但我们时常会有疑惑`cakin_make`和`make`的区别。我们可以简单理解为`catkin_make`是`make`的扩展,它更加适合ROS相关的编译。
+
+ `Catkin` 是 ROS 中使用的构建系统,而 `CMake `是 `Catkin` 的底层构建系统。具体而言,`Catkin` 使用 `CMake` 作为其构建系统的基础,它对 `CMake` 进行了扩展,以适应 ROS 的特殊需求和机器人软件包的组织。
+
+ 以下是它们之间的关系:
+
+1. **`CMake`:** `CMake` 是一个跨平台的开源构建系统,它使用一种基于文本的 DSL(领域特定语言)来描述软件项目的构建过程。`CMake` 生成适用于目标平台的构建系统文件,例如 `Makefile` 或` Visual Studio` 项目文件。
+2. **`Catkin`:** Catkin 是 ROS 特有的构建系统,构建在 `CMake` 之上。`Catkin` 扩展了 `CMake`,以便更好地支持 `ROS` 软件包的组织和构建。`Catkin` 引入了一些 ROS 特有的概念,例如工作空间(workspace)、软件包(package)、消息和服务生成等。
+
+ 在一个 `ROS` 工作空间中,通常会包含一个或多个` Catkin` 软件包,每个软件包都包含一个 `CMakeLists.txt` 文件,其中定义了软件包的构建规则、依赖关系等。总的来说,**Catkin 通过扩展 `CMake`,提供了一个更高级别的构建系统,使得在 ROS 中更容易管理和构建机器人软件项目**。 CMake 提供了通用的构建系统功能,而 `Catkin` 在其基础上添加了 `ROS` 特有的工具和概念。
+
+##### 1.2 `roslaunch`命令
+
+```shell
+roslaunch pibot_navigation nav.launch
+```
+
+ 在命令`roslaunch pibot_navigation nav.launch`中,`roslaunch`本质上是一个可执行文件。`pibot_navigation `是工作空间`workspace`中软件包。`ros_launch`是通过软件包下面的`package.xml`识别出功能包。`nav.launch`是`pibot_navigation`下面`launch`文件夹下的一个`nav.launch`文件,其本质是个一个`xml`文件,描述了要启动的节点以及对应要传递的参数。
\ No newline at end of file
+
+ 上述文件的结构和说明如下面的文档所示:
+
+```shell
+WorkSpace --- 自定义的工作空间
+ |--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
+ |--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
+ |--- src: 源码
+ |-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
+ |-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
+ |-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
+ |-- scripts 存储python文件
+ |-- src 存储C++源文件
+ |-- include 头文件
+ |-- msg 消息通信格式文件
+ |-- srv 服务通信格式文件
+ |-- action 动作格式文件
+ |-- launch 可一次性运行多个节点
+ |-- config 配置信息
+ |-- CMakeLists.txt: 编译的基本配置
+```
+
+##### 1.2 `package.xml`
+
+ 如上图所示,ROS的基本功能都是通过包(`package`)组织的。该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。请注意,该概念类似于旧版` rosbuild` 构建系统中使用的`manifest.xml`文件。
+
+ `package.xml`的部分内容如下图所示, 推测ROS系统通过`package.xml`的内容识别对应包的功能命令。
+
+```xml
+
+
+
+
+ demo01_hello_vscode
+
+ 0.0.0
+
+ ...
+
+```
+
diff --git a/Code/RK3588/PIBot_ROS/README.md b/Code/RK3588/PIBot_ROS/README.md
index 70ab732..e35b7fb 100644
--- a/Code/RK3588/PIBot_ROS/README.md
+++ b/Code/RK3588/PIBot_ROS/README.md
@@ -56,7 +56,7 @@ sudo apt-get install coinor-*
#### 3.1 导航的启动
- `PIBot_ROS`的文件解压或重新命名可以按照个人习惯即可,这里以解压后命名为`pibot_ros`为例,介绍命令启动导航
+ `PIBot_ROS`的文件解压或重新命名可以按照个人习惯即可,这里以解压后命名为`pibot_ros`为例,介绍命令启动导航。
```shell
# 进入到pibot_ros的工作空间
@@ -64,6 +64,7 @@ cd ~/pibot_ros/ros_ws
# 配置环境变量
source ./devel/setup.bash
# 启动导航文件
+# 格式 roslaunch package_name launch_file_name
roslaunch pibot_navigation nav.launch
```
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
index f131752..668049f 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/CMakeLists.txt
@@ -22,28 +22,24 @@ find_package(Boost REQUIRED)
# CATKIN_DEPENDS message_runtime std_msgs geometry_msgs
# )
-
include_directories(
# include
- ${OpenCV_INCLUDE_DIRS}
- ${catkin_INCLUDE_DIRS}
+${OpenCV_INCLUDE_DIRS}
+${catkin_INCLUDE_DIRS}
include
)
add_library(${PROJECT_NAME} SHARED
- src/system.cpp
src/uwb.cpp
src/mapping.cpp
src/align.cpp
- # src/read_sensor_data.cpp
include/senddata.h src/senddata.cpp)
add_message_files(
DIRECTORY msg
FILES
- RawImu.msg
-
+ RawImu.msg
)
generate_messages(DEPENDENCIES std_msgs geometry_msgs)
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/avoid.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/avoid.h
deleted file mode 100644
index e69de29..0000000
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
index e4bccc4..dcb928a 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/mapping.h
@@ -6,7 +6,6 @@
#ifndef MAPPING_H
#define MAPPING_H
-
namespace uwb_slam{
class Mapping
{
@@ -26,9 +25,7 @@ namespace uwb_slam{
bool read_uwb_ = false;
cv::Mat img;
cv::Point2d cur_point = {-1,-1};
-
};
-
}
#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h
deleted file mode 100644
index 39c7430..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/read_sensor_data.h
+++ /dev/null
@@ -1,34 +0,0 @@
-#include
-#include "nav_msgs/Odometry.h"
-#include "geometry_msgs/Twist.h"
-#include "sensor_msgs/Imu.h"
-#include "geometry_msgs/PoseStamped.h"
-#include "geometry_msgs/PoseWithCovarianceStamped.h"
-#include
-#include "type.h"
-#include "uwb.h"
-
-
-#ifndef READ_SENSOR_DATA_H
-#define READ_SENSOR_DATA_H
-
-namespace uwb_slam{
- typedef boost::shared_ptr OdomConstPtr;
- typedef boost::shared_ptr ImuConstPtr;
- class ReadSensorData
- {
- public:
- ReadSensorData();
-
- void Run(int argc, char* argv[]);
- //void set_uwb(Uwb * uwb);
- void imu_call_back(const ImuConstPtr& imu);
- void odom_call_back(const OdomConstPtr& odom);
-
- private:
- ros::Subscriber imu_sub_;
- ros::Subscriber odom_sub_;
-
- };
-}
-#endif
\ No newline at end of file
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h
deleted file mode 100644
index b0c5f85..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/system.h
+++ /dev/null
@@ -1,31 +0,0 @@
-#ifndef SYSTEM_H
-#define SYSTEM_H
-
-#include
-#include
-#include "mapping.h"
-#include "uwb.h"
-#include "senddata.h"
-#include "align.h"
-#include
-
-namespace uwb_slam{
- class System{
-
- public:
- System() {
- }
- void Run();
- public:
-
- std::shared_ptr Mapping_;
- std::shared_ptr Uwb_;
- std::shared_ptr Sender_;
- std::shared_ptr Align_;
-
- // Uwb* Uwb_ ;
- // Senddata* Sender_;
- // Mapping* Mapping_;
- };
-}
-#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
index 22fefb9..5754498 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/include/uwb.h
@@ -7,48 +7,30 @@
#include "type.h"
#include
#include
-#ifndef UWB_H
-#define UWB_H
+#ifndef __UWB_H__
+#define __UWB_H__
namespace uwb_slam{
- class Uwb
- {
- public:
- Uwb();
- void Run();
- bool checknewdata();
- void feed_imu_odom_pose_data();
- void UartUSBRead();
+class Uwb
+{
+public:
+ Uwb();
+ void Run();
+ bool checknewdata();
+ void feed_imu_odom_pose_data();
+ void UartUSBRead();
-
-
- public:
- int pre_seq = -1;
- int cur_seq = -1;
- uint8_t tmpdata[13];
- float x, y, theta, distance;
-
- // std::queue v_buffer_imu_odom_pose_data_;
-
-
- Uwb_data uwb_data_;
- // ros_merge_test::RawImu sub_imu_;
- // std::queue imu_odom_queue_;
- // std::queue uwb_data_queue_;
- std::mutex mMutexUwb;
- //boost::asio::io_service io;
- //boost::asio::serial_port s_port;
-
- // Imu_odom_pose_data imu_odom_pose_data_;
- };
-
+public:
+ int pre_seq = -1;
+ int cur_seq = -1;
+ uint8_t tmpdata[13];
+ float x, y, theta, distance;
+
+ Uwb_data uwb_data_;
+ std::mutex mMutexUwb;
+};
};
-
-
-
-
-
#endif
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
index 6bba774..73d8d1d 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/align.cpp
@@ -14,86 +14,86 @@ namespace uwb_slam{
ros::Time tmp1 = ros::Time::now();
ros::Time tmp2 = ros::Time::now();
-
+ // 这个地方分别订阅了原始IMU、轮式里程计、里程计(推测是UWB)
wheel_odom_sub_= nh_.subscribe("wheel_odom",10,&Align::wheel_odomCB,this);
- imu_sub_= nh_.subscribe("raw_imu",10,&Align::imuCB,this);
- odom_sub_= nh_.subscribe("odom",10,&Align::odomCB,this);
+ imu_sub_ = nh_.subscribe("raw_imu",10,&Align::imuCB,this);
+ odom_sub_ = nh_.subscribe("odom",10,&Align::odomCB,this);
std::ofstream outfile("data.txt",std::ofstream::out);
if(outfile.is_open())
{
- img1 = cv::Mat(200, 200, CV_8UC1, cv::Scalar(255,255,255));
- cv::imshow("Image1",img1);
- int key2 = cv::waitKey(0);
- // if(key2 =='w'){
- // bool write_data_ = true;
- // }
-
- // int count=0;
- // while(write_data_){
- while(1){
-
- int key3 = cv::waitKey(1);
- if(key3 == 'w'){
- break;
- }
- if(tmp!=imu_odom_.imu_data_.imu_t_){
- // outfile <<"imu_odom_: "<< "imu_timestamp "<<"imu_linear_acc_x_y_z "<<"imu_angular_x_y_z "<<
- // "odom_vxy "<<"odom_angle_v_ "<<"\n";
- // if(tmp1!=uwb_->uwb_data_.uwb_t_&& tmp2!=odom_tmp_){
- outfile << std::left << std::setw(12)<<"imu_odom_: "<< std::setw(10)<< imu_odom_.imu_data_.imu_t_.sec << '.' <uwb_data_.uwb_t_-tmp1).sec<<'.'<uwb_data_.uwb_t_-tmp1).nsec << std::setw(9)
- <uwb_data_.x_ << std::setw(9)<uwb_data_.y_<<"\n";
- tmp1 = uwb_->uwb_data_.uwb_t_;
- tmp2 = odom_tmp_;
- // }
- // else if(tmp1!=uwb_->uwb_data_.uwb_t_){
- // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
- // <uwb_data_.uwb_t_<<"*"<uwb_data_.x_<<"*"<uwb_data_.y_<<"\n";
- // tmp1 = uwb_->uwb_data_.uwb_t_;
- // }
- // else if(tmp2!=odom_tmp_){
- // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
- // <uwb_data_.uwb_t_;
-
- // if(count>300)
- // break;
- }
+ img1 = cv::Mat(200, 200, CV_8UC1, cv::Scalar(255,255,255));
+ cv::imshow("Image1", img1);
+ int key2 = cv::waitKey(0);
+ // if(key2 =='w'){
+ // bool write_data_ = true;
+ // }
- }
+ // int count=0;
+ // while(write_data_){
+ while(1){
- outfile.close();
- std::cout<< "Data written to file." << std::endl;
+ int key3 = cv::waitKey(1);
+ if(key3 == 'w'){
+ break;
+ }
+ if(tmp!=imu_odom_.imu_data_.imu_t_)
+ {
+ // outfile <<"imu_odom_: "<< "imu_timestamp "<<"imu_linear_acc_x_y_z "<<"imu_angular_x_y_z "<<
+ // "odom_vxy "<<"odom_angle_v_ "<<"\n";
+ // if(tmp1!=uwb_->uwb_data_.uwb_t_&& tmp2!=odom_tmp_){
+ outfile << std::left << std::setw(12)<<"imu_odom_: "<< std::setw(10)<< imu_odom_.imu_data_.imu_t_.sec << '.' <uwb_data_.uwb_t_-tmp1).sec<<'.'<uwb_data_.uwb_t_-tmp1).nsec << std::setw(9)
+ <uwb_data_.x_ << std::setw(9)<uwb_data_.y_<<"\n";
+ tmp1 = uwb_->uwb_data_.uwb_t_;
+ tmp2 = odom_tmp_;
+ // }
+ // else if(tmp1!=uwb_->uwb_data_.uwb_t_){
+ // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
+ // <uwb_data_.uwb_t_<<"*"<uwb_data_.x_<<"*"<uwb_data_.y_<<"\n";
+ // tmp1 = uwb_->uwb_data_.uwb_t_;
+ // }
+ // else if(tmp2!=odom_tmp_){
+ // outfile <<"imu_odom_: "<< imu_odom_.imu_data_.imu_t_ <<"*"
+ // <uwb_data_.uwb_t_;
+
+ // if(count>300)
+ // break;
+ }
+ }
+
+ outfile.close();
+ std::cout<< "Data written to file." << std::endl;
}
else{
std::cout<<"file can not open"< system = std::make_shared();
std::shared_ptr mp = std::make_shared();
std::shared_ptr uwb = std::make_shared();
std::shared_ptr sender = std::make_shared();
std::shared_ptr align = std::make_shared();
-
- // uwb_slam::System* system = new uwb_slam::System();
- // uwb_slam::Mapping* mp = new uwb_slam::Mapping();
- // uwb_slam::Uwb* uwb = new uwb_slam::Uwb();
- // uwb_slam::Senddata* sender = new uwb_slam::Senddata();
- system->Mapping_ = mp;
- system->Mapping_->uwb_ = uwb;
- system->Uwb_ = uwb;
- system->Sender_ = sender;
- system->Align_ = align;
-
- mp->uwb_ = system->Uwb_;
- align->uwb_ = system->Uwb_;
+ mp->uwb_ = uwb;
+ align->uwb_ = uwb;
-
- // control data fllow in system
- std::thread rose_trd([&system]() {
- system->Run();
- });
// uwb serried read
std::thread uwb_trd([&uwb]() {
uwb->Run();
@@ -67,5 +50,4 @@ int main(int argc, char** argv)
// Start the ROS node's main loop
ros::spin();
- //System->run()
}
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
index 9f9ddc2..a277f48 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/mapping.cpp
@@ -40,10 +40,7 @@ namespace uwb_slam
void Mapping::Run()
{
-
- //int key = cv::waitKey(0);//等待用户按下按键
- //std::cout << key << std::endl;
- int realWidth = AREA_SIZE / PIXEL_SCALE;
+ int realWidth = AREA_SIZE / PIXEL_SCALE;
int realHeight = AREA_SIZE / PIXEL_SCALE;
img = cv::Mat(realHeight, realWidth, CV_8UC1, cv::Scalar(255,255,255));
@@ -56,20 +53,8 @@ namespace uwb_slam
for (int i=199+8;i<210;i+=1)
img.at(j,i)= 0;
-
-
cv::imshow("Image",img);
- /*
- std::cout << "waiting" <feed_uwb_data(cv::Point2d(uwb_->x,uwb_->y));
- read_uwb_ = true;
- std::cout << "non" << key << std::endl;
- cv::destroyAllWindows();
- }
- */
while(1)
{
// 这个地方会持续阻塞
@@ -94,23 +79,11 @@ namespace uwb_slam
this->feed_uwb_data(cv::Point2d(uwb_->x ,uwb_->y));
-
- //uwb xieru
- //std::cout << "cur_SEQ: " <cur_seq << std::endl;
-
- if(check_uwb_point())
- {
- //std::cout << " start process" << std::endl;
+ if(check_uwb_point()){
process();
- //std::cout << " end process" << std::endl;
}
}
- // std::cout << "out" << key << std::endl;
}
- //std::string pngimage="../Map/pngimage.png";//保存的图片文件路径
- //cv::imwrite(pngimage,img);
-
- /*ros 发送图片给导航 */
}
} // namespace uwb_slam
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp
deleted file mode 100644
index 34bd9ee..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/read_sensor_data.cpp
+++ /dev/null
@@ -1,33 +0,0 @@
-#include
-
-namespace uwb_slam {
-
-
- //void Read_sensor_data::set_uwb(){}
-
-
- void ReadSensorData::imu_call_back(const ImuConstPtr& imu){
- Imu_data d1= Imu_data(imu->linear_acceleration.x,imu->linear_acceleration.y,imu->linear_acceleration.z,
- imu->angular_velocity.x,imu->angular_velocity.y,imu->angular_velocity.z);
-
- }
- void ReadSensorData::odom_call_back(const OdomConstPtr& odom){
- Odom_data d1 = Odom_data(odom->pose.pose.position.x, odom->pose.pose.position.y, odom->pose.pose.position.z,
- odom->pose.pose.orientation.w,odom->pose.pose.orientation.x, odom->pose.pose.orientation.y, odom->pose.pose.orientation.z,
- odom->header.stamp,odom->twist.twist.linear.x,odom->twist.twist.linear.y,odom->twist.twist.angular.z);
-
- }
- void ReadSensorData::Run(int argc, char* argv[]){
-
- ros::init(argc, argv, "imu_odom");
- // 创建一个节点句柄
- ros::NodeHandle nh;
-
- //imu_sub_ = nh.subscribe("imu/data_raw", 1000, this->imu_call_back);
- //odom_sub_ = nh.subscribe("odom", 1000, odom_call_back);
-
- // 运行ROS事件循环
- ros::spin();
- }
-
-}
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp
deleted file mode 100644
index 12eb8ad..0000000
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/system.cpp
+++ /dev/null
@@ -1,10 +0,0 @@
-#include "../include/system.h"
-
-namespace uwb_slam{
-
- void System::Run()
- {
- while(1){
- }
- }
-}
\ No newline at end of file
diff --git a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
index b3cd31e..c2f8fc7 100644
--- a/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
+++ b/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/uwb.cpp
@@ -2,7 +2,9 @@
* File Name : uwb.cpp
* Current Version : V1.0
* Date of Issued : 2023.12.13 zhanli@review
-* Comments : UWB数据驱动, 负责从串口读取USB并发布出去
+* Comments : UWB数据驱动, 负责从串口读取USB并发布出去,这个代码可能存在以下
+ 改进:1) 创建固定的串口读取对象serial_port 2) 修改代码为异步
+ 读取。3) 确认串口数据的长度
********************************************************************************/
#include "uwb.h"
#include
@@ -18,16 +20,22 @@ namespace uwb_slam{
void Uwb::Run() {
while(1){
// 这个地方不控制速率?
+ // UartUSBRead 这个地方本身就是同步读取串口,是阻塞的函数
this->UartUSBRead();
}
}
-
+ /**---------------------------------------------------------------------
+ * Function : UartUSBRead
+ * Description : 通过串口读取数据,目前这段代码存在部分问题:1) 每次都重复创建
+ * 串口读取对象,可能会影响性能。
+ * Date : 2023/12/13 zhanli@review
+ *---------------------------------------------------------------------**/
void Uwb::UartUSBRead()
{
try {
boost::asio::io_service io;
- boost::asio::serial_port serial(io, "/dev/ttyUSB0"); // 替换成你的串口设备路径
+ boost::asio::serial_port serial(io, "/dev/ttyUSB0"); // 替换成你的串口设备路径
serial.set_option(boost::asio::serial_port_base::baud_rate(115200)); // 设置波特率
serial.set_option(boost::asio::serial_port_base::character_size(8)); // 设置数据位
@@ -35,33 +43,19 @@ namespace uwb_slam{
serial.set_option(boost::asio::serial_port_base::stop_bits(boost::asio::serial_port_base::stop_bits::one)); // 设置停止位
uint8_t tmpdata[12];
-
- size_t bytesRead = boost::asio::read(serial, boost::asio::buffer(tmpdata, 12)); // 读取串口数据
- // std::cerr << "after read" << std::endl;
+ // 读取串口数据
+ size_t bytesRead = boost::asio::read(serial, boost::asio::buffer(tmpdata, 12));
- // for (int i=0;i< bytesRead;i++)
- // {
- // std::cout << "Received data: " << std::hex<(tmpdata[i]) ;
- // }
+ // UWB获取的数据是半径R和角度Theta
memcpy(&this->distance, &tmpdata[3], sizeof(distance));
memcpy(&this->theta, &tmpdata[7], sizeof(theta));
- /*this->x = cosf(theta/180*PI)*distance+1000;
- this->y = sinf(theta/180*PI)*distance+1000;
- this->theta = theta;*/
- this->uwb_data_.x_ = cosf(theta/180*PI)*distance+1000;
- this->uwb_data_.y_ = sinf(theta/180*PI)*distance+1000;
+
+ // 这个地方是为了把UWB的坐标移动到图像的中心位置 2023/12/13@李瑞瑞
+ this->uwb_data_.x_ = cosf(theta / 180*PI)*distance + 1000;
+ this->uwb_data_.y_ = sinf(theta / 180*PI)*distance + 1000;
+ // 获取此时的系统时间戳
this->uwb_data_.uwb_t_ = ros::Time::now();
- // uwb_data_queue_.push(uwb_data_);
-
- //std::cout << "uwb_data_: " << uwb_data_.uwb_t_<< std::endl;
- // cur_seq = static_cast(tmpdata[3]);
- //std::cout << "****** cur _ sequence: " << cur_seq << "x: " << x << " y: " << y <(tmpdata[3]);
-
std::cout << "theta: " << theta << " distance: " << distance << std::endl;
} catch (const std::exception& ex) {
@@ -69,10 +63,6 @@ namespace uwb_slam{
<< ex.what() << std::endl;
}
}
-
- void fusion()
- {
- }
};
diff --git a/Docs/ROS基础之基本函数.md b/Docs/ROS基础之基本函数.md
new file mode 100644
index 0000000..d073183
--- /dev/null
+++ b/Docs/ROS基础之基本函数.md
@@ -0,0 +1,18 @@
+# ROS基础笔记
+
+##### 1.1 `ros::Rate`的用法
+
+ `ros::Rate` 是ROS中用于控制循环频率的工具。在你提到的代码中,`ros::Rate loop_rate(10);` 创建了一个 `ros::Rate` 对象,其目的是控制循环的频率。
+
+```c++
+ros::Rate loop_rate(10); // 设置事件循环的频率为10Hz
+
+while (ros::ok()) {
+ // 处理其他任务,这个地方不能处理过于耗时的操作
+
+ ros::spinOnce(); // 处理一次事件循环
+ loop_rate.sleep(); // 使节点等待足够的时间以达到设定的频率
+}
+
+```
+
diff --git a/Docs/ROS基础之基本命令.md b/Docs/ROS基础之基本命令.md
new file mode 100644
index 0000000..4f89249
--- /dev/null
+++ b/Docs/ROS基础之基本命令.md
@@ -0,0 +1,33 @@
+# ROS基础之基础命令
+
+> https://blog.csdn.net/sinat_16643223/article/details/113935412
+
+## 一、常用命令
+
+##### 1.1 `catkin_make`编译命令
+
+```shell
+# 进入工作空间
+cd ros_ws
+# 编译
+catkin_make
+```
+
+ 我们在使用ROS的时候经常会使用`catkin_make`命令,但我们时常会有疑惑`cakin_make`和`make`的区别。我们可以简单理解为`catkin_make`是`make`的扩展,它更加适合ROS相关的编译。
+
+ `Catkin` 是 ROS 中使用的构建系统,而 `CMake `是 `Catkin` 的底层构建系统。具体而言,`Catkin` 使用 `CMake` 作为其构建系统的基础,它对 `CMake` 进行了扩展,以适应 ROS 的特殊需求和机器人软件包的组织。
+
+ 以下是它们之间的关系:
+
+1. **`CMake`:** `CMake` 是一个跨平台的开源构建系统,它使用一种基于文本的 DSL(领域特定语言)来描述软件项目的构建过程。`CMake` 生成适用于目标平台的构建系统文件,例如 `Makefile` 或` Visual Studio` 项目文件。
+2. **`Catkin`:** Catkin 是 ROS 特有的构建系统,构建在 `CMake` 之上。`Catkin` 扩展了 `CMake`,以便更好地支持 `ROS` 软件包的组织和构建。`Catkin` 引入了一些 ROS 特有的概念,例如工作空间(workspace)、软件包(package)、消息和服务生成等。
+
+ 在一个 `ROS` 工作空间中,通常会包含一个或多个` Catkin` 软件包,每个软件包都包含一个 `CMakeLists.txt` 文件,其中定义了软件包的构建规则、依赖关系等。总的来说,**Catkin 通过扩展 `CMake`,提供了一个更高级别的构建系统,使得在 ROS 中更容易管理和构建机器人软件项目**。 CMake 提供了通用的构建系统功能,而 `Catkin` 在其基础上添加了 `ROS` 特有的工具和概念。
+
+##### 1.2 `roslaunch`命令
+
+```shell
+roslaunch pibot_navigation nav.launch
+```
+
+ 在命令`roslaunch pibot_navigation nav.launch`中,`roslaunch`本质上是一个可执行文件。`pibot_navigation `是工作空间`workspace`中软件包。`ros_launch`是通过软件包下面的`package.xml`识别出功能包。`nav.launch`是`pibot_navigation`下面`launch`文件夹下的一个`nav.launch`文件,其本质是个一个`xml`文件,描述了要启动的节点以及对应要传递的参数。
\ No newline at end of file