forked from logzhan/UPBot-Pioneer
2.5 KiB
2.5 KiB
PIBot_ROS说明
更新:
zhanli2023-12-13
一、PIBot_ROS简介
PIBot_ROS本质上一个封装功能非常完善的功能包,其内部添加了许多已经整合好了功能,更加便于使用。
ros_package: 内置了许多算法的功能包的压缩包pypibot:pibot相关的python支持功能pibot_upstart: 未知待补充ros_ws:ROS的工作空间
1.1 ros_ws的目录结构
下图中catkin_workspcae对应即是ros_ws文件夹。其下面一般具有src、build、devel等功能。
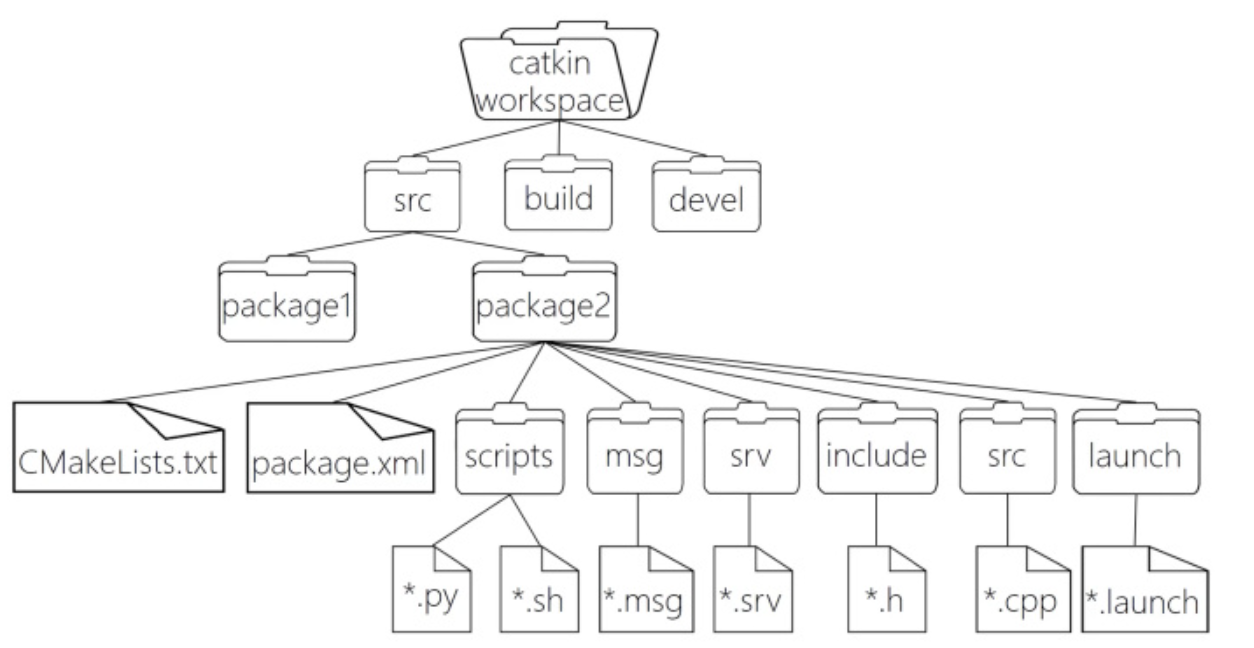
上述文件的结构和说明如下面的文档所示:
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
1.2 package.xml
如上图所示,ROS的基本功能都是通过包(package)组织的。该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。请注意,该概念类似于旧版 rosbuild 构建系统中使用的manifest.xml文件。
package.xml的部分内容如下图所示, 推测ROS系统通过package.xml的内容识别对应包的功能命令。
<?xml version="1.0"?>
<!-- 格式: 以前是 1,推荐使用格式 2 -->
<package format="2">
<!-- 包名 -->
<name>demo01_hello_vscode</name>
<!-- 版本 -->
<version>0.0.0</version>
<!-- 描述信息 -->
...
</package>