git commit -m 修改代码“ |
||
|---|---|---|
| .idea | ||
| Code | ||
| Docs | ||
| Image | ||
| README.md | ||
README.md
Lighthouse-UESTC
特别注意:最近发现SteamVR在重启后,本项目提供的配置文件会被覆盖,从而导致识别不正常。所以重新使用的时候需要重新覆盖配置文件。
描述:这个项目是利用valve的高精度激光定位系统Lighthouse实现对其他非高精度的定位设备进行误差评估的系统。Lighthouse的工作原理文档路径为Docs\Lighthouse工作原理.md。
一、硬件设备
1.1 设备的准备
将Lighthouse用于定位参考设备,只需要准备如下即可,目前经过实验室的是1.0版本的9灯基站和以及1.0的手柄。
| 设备名 | 数量 | 备注 |
|---|---|---|
| HTC 激光基站 & 电源 | 2 | 根据情况可以选择1.0、2.0、3.0的版本,购买的时候一般商家会配套电源。二手产品需要注意购买电源 |
| HTC 手柄或者Tracker | 1 | 根据情况可以选择1.0、2.0、3.0的版本,购买的时候需要对应购买接收器。 |
| 激光基站的支架 | 2 | 基站的顶部需要额外增加万向转接头,可以调整基站方向。 |
1.2 Lightouse的安装与设置
Lighthouse基站安装一般推荐安装在较高的位置,可以俯瞰地面的设备。一般安装在2m以上的位置,可以选择天花板倒置安装,也可以选择支架安装。

二、软件的准备
软件的核心安装步骤有3个步骤。主要容易出问题的是步骤2。目前提供的样例配置文件会针对特定的手柄设备,如果硬件ID不一样,可能需要通过2.1到2.3中的配置原理,进行变更。核心步骤如下:
- Steam和SteamVR的安装
- 更换配置文件,样例的配置文件在
Code\steamvr_config目录下,直接替换Steam下面的目录文件C:\Program Files (x86)\Steam\steamapps\common(默认)即可 - Python安装以及openvr库的安装,运行Python读取坐标
2.1 软件的配置原理
软件方面主要需要安装Steam平台和SteamVR。理论上SteamVR底层的OpenVR可以支持各种语言。目前最简单的是采用python读取数据。
2.2 SteamVR的配置原理
正常来说,SteamVR的启动必须需要头显才能启动。所以,采取的方式有两种,第一种是绕过头盔启动。第二种方式是把控制器的虚拟为头盔。
2.2.1 查看SteamVR的log
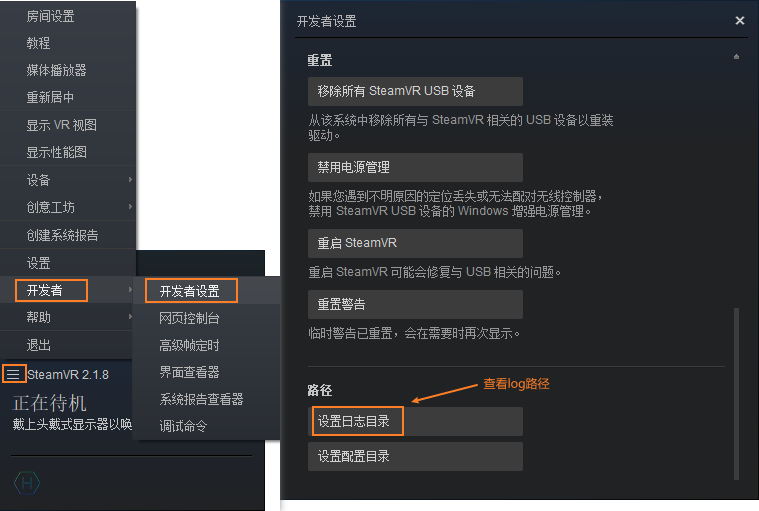
既然是设备是通过steamVR来驱动链接的,那么在steamVR启动的时候,肯定就要做设备初始化等等的工作,那么设备加载初始化的时候,到底是加载了那些文件了,导致非要加载头显HMD。我们可以通过查看log来查看SteamVR到底加载了那些驱动和设置。查看log的方式如下图所示:
2.2.2 配置文件的修改——绕过头盔启动
在找到SteamVR的log后(log文件:vrserver.txt),我们可以对log进行分析:
... [Settings] Load Default Json Settings from ...\common\SteamVR\drivers\htc\resources\settings\default.vrsettings
... [Settings] Load Default Json Settings from ...\common\SteamVR\drivers\lighthouse\resources\settings\default.vrsettings
... [Settings] Load Default Json Settings from ...\common\SteamVR\drivers\null\resources\settings\default.vrsettings
... [Settings] Load Default Json Settings from ...\common\SteamVR\resources\settings\default.vrsettings
... [Settings] Load Json Settings from C:\Program Files (x86)\Steam\config\steamvr.vrsettings
实际经过发现,只需要修改2个文件就可以实现绕过头显启动,分别为上面的第3和第4个文件。
一般来说,SteamVR的驱动路径为C:\Program Files (x86)\Steam\steamapps\common\SteamVR,如果找不到也可以在Steam平台上找到SteamVR,然后选择右键->管理->浏览本地文件。
找到并修改Resource\Settings\default.vrsettings:
// requireHmd == false可以使得SteamVR面板的头盔图标亮起, 但是一会儿就处于休眠状态
"requireHmd" : false
// 强制驱动为null driver, null driver是steamvr的一个空驱动
"forcedDriver" : "null"
// 强制多个驱动,估计是增加可以激活lighthouse的控制器
"activateMultipleDrivers" : true
找到drivers\null\resources\settings\default.vrsettings进行修改:
{
"driver_null" : {
// 由false修改为ture
"enable" : true,
"serialNumber" : "Null Serial Number",
"modelNumber" : "Null Model Number",
"windowX" : 0,
"windowY" : 0,
"windowWidth" : 2160,
"windowHeight" : 1200,
"renderWidth" : 1512,
"renderHeight" : 1680,
"secondsFromVsyncToPhotons" : 0.01111111,
"displayFrequency" : 90.0
}
}
2.2.3 配置文件的修改——控制器的虚拟为头盔
配置文件完整样例在:Code\steamvr_config下,下面是修改的原理介绍以及实际修改方法。
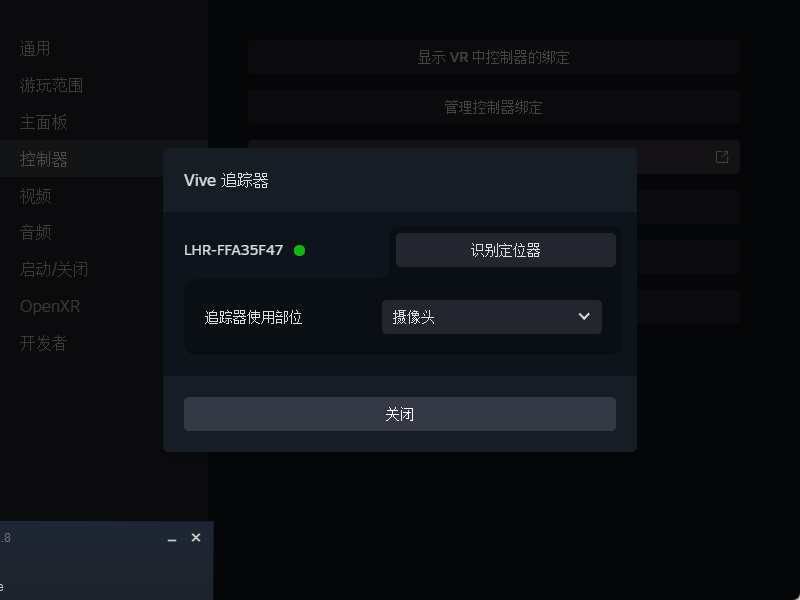
要将控制器虚拟为头盔,操作和2.2.2的配置一致,但是需要额外添加配置。通过SteamVR的选项菜单->设备->管理追踪器->管理定位器,即可看到控制器的ID信息。如下图所示,本机的定位ID为:LHR-FFA35F47
对应的修改配置文件,我们在配置文件接近结尾处,添加Json的键值对TrackingOverrides, 将控制器的路径映射到头显。值得注意的是,控制器的路径和设备有关,需要根据实际设备的信息调整,不能盲目修改。
{
// 上方省略
// 这个地方添加了追踪映射
"TrackingOverrides" : {
// 注意LHR-FFA35F47一般是控制器设备的信息,根据实际设备进行填写
"/devices/htc/vive_trackerLHR-FFA35F47" : "/user/head"
},
// 以下不用修改
"version": "1",
"jsonid": "vrsettings"
}
2.3 Python读取定位数据
# 安装openvr库
pip install openvr
# 进入工作目录
cd Code/triad_openvr
# 获取指定设备的位置和姿态, 这里需要根据实际的设备类型对代码进行调整
python tracker_test.py
三、问题和解决方案
3.1 此设备目前不在定位,请确认其在一个定位器的定位范围内。
上述问题在SteamVR的面板显示如下图所示。这种问题产生的原因是因为基站的位置放置错误。两个基站放置的太近了,一般两个基站需要相距1米以上。