diff --git a/README.md b/README.md
index 26935e5..94e9a4b 100644
--- a/README.md
+++ b/README.md
@@ -16,7 +16,72 @@
## 一、 项目状态
-### 1.1 最新进度说明
+#### 1.1 进度说明(2023-12-15)
+
+##### 1.1.1 小车融合定位的说明:
+
+ 下图描述了小车采用`UWB`和`IMU`以及`ODM`的曲线对比。其中蓝色线表示`Lighthouse`的轨迹,红色线表示里程计的轨迹。黄色点表示的是`UWB`的轨迹点,紫色线表示多传感器融合后的结果。
+
+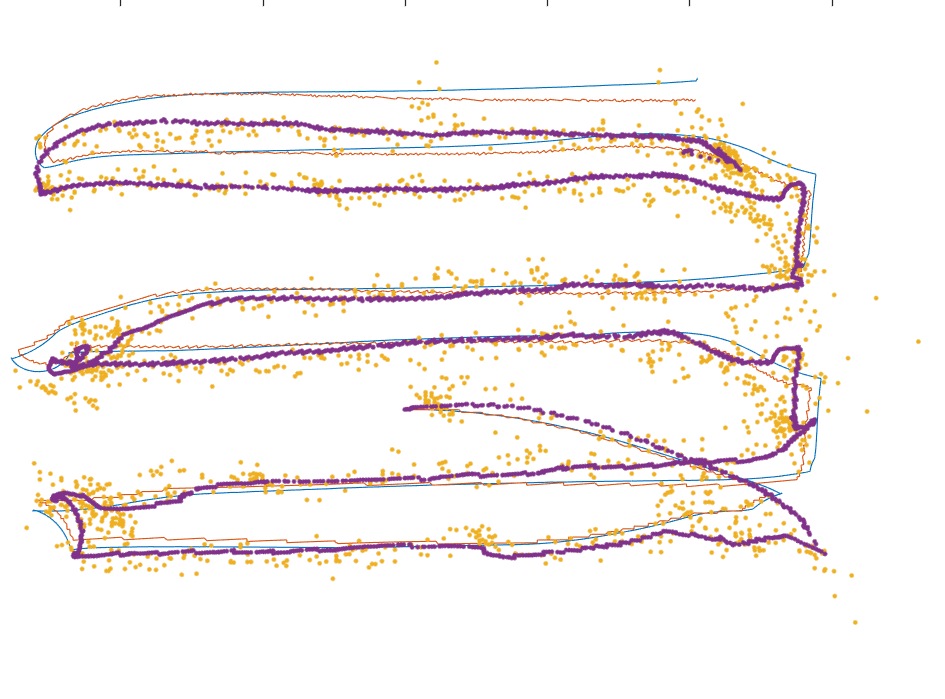 +
+ 近期的实验以及上图说明:
+
+1. `Lighthouse`定位精度较高,各种现象符合预期。
+2. 里程计在运行的早期精度很高,早期阶段远比`UWB`精度高。
+3. 虽然现阶段数据看起来融合后的结果比单纯里程计差,实际上是因为里程计的运行时间较短位置还没有发散,所以融合后的结果看起来比单纯里程计差。如果长时间运行,融合的优势才会逐步体现。
+4. 目前融合结果很大意义在于:目前我们的割草机器人初步拥有了一套完整的定位系统。相比单纯`UWB`定位和单纯里程计定位,融合后的结果结合了里程计的轨迹波动小的优点以及`UWB`长期运行不发散的问题。虽然对于部分同学毕业设计存在些许问题,但是对于**割草机器人项目推进来说,定位已经不是阻碍,可以继续推进后续的目标检测、目标测距、导航避障、基于避障的全图路径规划**。
+
+##### 1.1.2 下一阶段要解决的问题
+
+ 最近和许洪裱和卢瑞飞一同联调定位算法,发现项目有以下问题需要改进:
+
+1. 文档支持: 目前研二同学较多使用的是`notion`记录笔记,这个用于个人和团队使用没有问题。但是对应的,我们需要在代码仓库中维护一套`markdown`的文档。目前我已经在仓库中写了很多文档样例,后续研二开发同学`clone`仓库,完善文档和提交。
+
+ 1. 目前小车融合定位的节点如何启动的文档已经写了,但是全图路径规划的操作文档没有写。整个小车融合定位启动和路径规划的文档需要再梳理完善下(瑞飞较为熟悉操作步骤,跃杭协同瑞飞一起完善下)。
+
+2. 小车的直线偏移问题:这个问题还是影响比较大的,直接会影响路径规划的准确性。怀疑小车的`PID`调节模块没有起到作用。解决思路:给定小车前进的命令,记录小车的左右轮速,如果上报的左右轮速不同说明小车底盘的`PID`调节没有生效,需要看看编译选项问题或者代码逻辑问题。(涛锋)
+
+3. `ros_merge_test`代码问题:
+
+ 1. `uwb_slam::System`功能无效,内部有死循环会占用`CPU`,需要删除模块
+ 2. `read_sensor_data.cpp和.h` 功能无效,需要删除
+ 3. `avoid.h`无效需要删除
+ 4. 标准的注释格式需要完善, 无效代码需要整理,` ../RobotKernal-UESTC/src/branch/main/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/main.cpp` 样例如下:
+
+ ```c++
+ /******************** (C) COPYRIGHT 2023 UPBot **********************************
+ * File Name : main.cpp
+ * Current Version : V1.0
+ * Date of Issued : 2023.12.13 zhanli@review
+ * Comments : UPbot割草机器人项目传感器融合定位入口函数
+ ********************************************************************************/
+ #include "../include/system.h"
+ #include "../include/uwb.h"
+ #include
+ #include
+ #include
+ #include "senddata.h"
+
+
+ /**---------------------------------------------------------------------
+ * Function : main
+ * Description : 多传感器融合定位的入口函数
+ * Date : 2023/12/13 zhanli@review
+ *---------------------------------------------------------------------**/
+ int main(int argc, char** argv)
+ ```
+
+4. 路径规划问题:
+
+ 目前路径规划是依靠`ROS`运行的,但是存在如下的疑问:
+
+ 4.1.`ros`内置的全图规划原理是什么?需要给出文档
+
+ 4.2.`ros`内置的路径规划代码,能否抽离出来?或者自己掌握路径规划包的编写自己的路径规划包?
+
+ 4.3.思考后续如何和目标检测的结果进行协同,观测到障碍物重新避障,给出思路文档
+
+#### 1.1 进度说明(2023-12-01)
| 项目 | 状态和说明 | 负责人 | 状态 | 更新时间 |
| ------------------------------------------------- | ------------------------------------------------------------ | ------ | ------ | ---------- |
@@ -49,4 +114,5 @@
机器人正面和背面图

+
机器人充电界面和充电底座
\ No newline at end of file
+
+ 近期的实验以及上图说明:
+
+1. `Lighthouse`定位精度较高,各种现象符合预期。
+2. 里程计在运行的早期精度很高,早期阶段远比`UWB`精度高。
+3. 虽然现阶段数据看起来融合后的结果比单纯里程计差,实际上是因为里程计的运行时间较短位置还没有发散,所以融合后的结果看起来比单纯里程计差。如果长时间运行,融合的优势才会逐步体现。
+4. 目前融合结果很大意义在于:目前我们的割草机器人初步拥有了一套完整的定位系统。相比单纯`UWB`定位和单纯里程计定位,融合后的结果结合了里程计的轨迹波动小的优点以及`UWB`长期运行不发散的问题。虽然对于部分同学毕业设计存在些许问题,但是对于**割草机器人项目推进来说,定位已经不是阻碍,可以继续推进后续的目标检测、目标测距、导航避障、基于避障的全图路径规划**。
+
+##### 1.1.2 下一阶段要解决的问题
+
+ 最近和许洪裱和卢瑞飞一同联调定位算法,发现项目有以下问题需要改进:
+
+1. 文档支持: 目前研二同学较多使用的是`notion`记录笔记,这个用于个人和团队使用没有问题。但是对应的,我们需要在代码仓库中维护一套`markdown`的文档。目前我已经在仓库中写了很多文档样例,后续研二开发同学`clone`仓库,完善文档和提交。
+
+ 1. 目前小车融合定位的节点如何启动的文档已经写了,但是全图路径规划的操作文档没有写。整个小车融合定位启动和路径规划的文档需要再梳理完善下(瑞飞较为熟悉操作步骤,跃杭协同瑞飞一起完善下)。
+
+2. 小车的直线偏移问题:这个问题还是影响比较大的,直接会影响路径规划的准确性。怀疑小车的`PID`调节模块没有起到作用。解决思路:给定小车前进的命令,记录小车的左右轮速,如果上报的左右轮速不同说明小车底盘的`PID`调节没有生效,需要看看编译选项问题或者代码逻辑问题。(涛锋)
+
+3. `ros_merge_test`代码问题:
+
+ 1. `uwb_slam::System`功能无效,内部有死循环会占用`CPU`,需要删除模块
+ 2. `read_sensor_data.cpp和.h` 功能无效,需要删除
+ 3. `avoid.h`无效需要删除
+ 4. 标准的注释格式需要完善, 无效代码需要整理,` ../RobotKernal-UESTC/src/branch/main/Code/RK3588/Robot_ROS_APP/src/ros_merge_test/src/main.cpp` 样例如下:
+
+ ```c++
+ /******************** (C) COPYRIGHT 2023 UPBot **********************************
+ * File Name : main.cpp
+ * Current Version : V1.0
+ * Date of Issued : 2023.12.13 zhanli@review
+ * Comments : UPbot割草机器人项目传感器融合定位入口函数
+ ********************************************************************************/
+ #include "../include/system.h"
+ #include "../include/uwb.h"
+ #include
+ #include
+ #include
+ #include "senddata.h"
+
+
+ /**---------------------------------------------------------------------
+ * Function : main
+ * Description : 多传感器融合定位的入口函数
+ * Date : 2023/12/13 zhanli@review
+ *---------------------------------------------------------------------**/
+ int main(int argc, char** argv)
+ ```
+
+4. 路径规划问题:
+
+ 目前路径规划是依靠`ROS`运行的,但是存在如下的疑问:
+
+ 4.1.`ros`内置的全图规划原理是什么?需要给出文档
+
+ 4.2.`ros`内置的路径规划代码,能否抽离出来?或者自己掌握路径规划包的编写自己的路径规划包?
+
+ 4.3.思考后续如何和目标检测的结果进行协同,观测到障碍物重新避障,给出思路文档
+
+#### 1.1 进度说明(2023-12-01)
| 项目 | 状态和说明 | 负责人 | 状态 | 更新时间 |
| ------------------------------------------------- | ------------------------------------------------------------ | ------ | ------ | ---------- |
@@ -49,4 +114,5 @@
机器人正面和背面图

+
机器人充电界面和充电底座
\ No newline at end of file