3.2 KiB
3.2 KiB
2024-04-28
1.已有功能
- UWB融合IMU、ODOM定位。
- 双目测距、目标检测
- 全覆盖路径规划
- 碰撞传感器、超声波传感器接入:可以考虑扩展三个超声波传感器,用于提高障碍物分辨率
- 基于双目、碰撞、超声波的避障+全覆盖:目前割草机器人的避障识别能力需要进一步优化
- 手持标签划定范围:用户预先划定机器人的割草范围
- USB-HID通信:利用USB-HID通信,可以精确确定USB设备并开启,提高设备的稳定性和扩展性。
2. 需开发功能
- 草坪和非草坪识别功能:通过摄像头识别草坪与非草坪,决定是否开启割草马达
- 基于语义分割的环境建图 :根据语义分割功能,创建语义地图,识别草坪的实际边界和障碍物,建立语义地图
- UWB融合定位自动对准:自动对齐IMU和UWB的坐标系
- UWB杆位置初始化:机器人运动一段时间后,估计出UWB标杆的位置,省去手动输入坐标位置的问题
- APP控制机器人操作,省去命令行控制机器人
- 自动回充
3.当前问题
2024-04-01
1.当前状态:
目前融合定位和摄像头检测避障程序都有初步DEMO,联合运行存在问题。
2.摄像头避障问题
目前摄像头避障存在不及时的问题,已经检测到目标障碍物了,但是会撞到障碍物。原因:全覆盖地图和摄像头避障回调是两个单独的线程。当摄像头检测到避障后,回调函数设置障碍标志位。但是此时全覆盖的策略亦然在线程里面运行,还没有进入避障逻辑,已经撞到障碍物了。
void sendNavigation(vector<loc> pos){
for(p in pos){
NavigationSet(pos);
sleep(0.1);
}
}
void navigateExplorationPath(){
if(flag == true){
// 避开障碍物策略
...
}
// 发送导航目标
sendNavigation(pos);
}
void SteroCB(float dist){
if(dist > 10 && dist < 60){
flag = true;
}
}
解决方案:2024/04/01实验确定了是全覆盖的策略导致的避障不及时问题。 需要额外增加合适的标志位打断原先的全覆盖逻辑,进入避障的逻辑
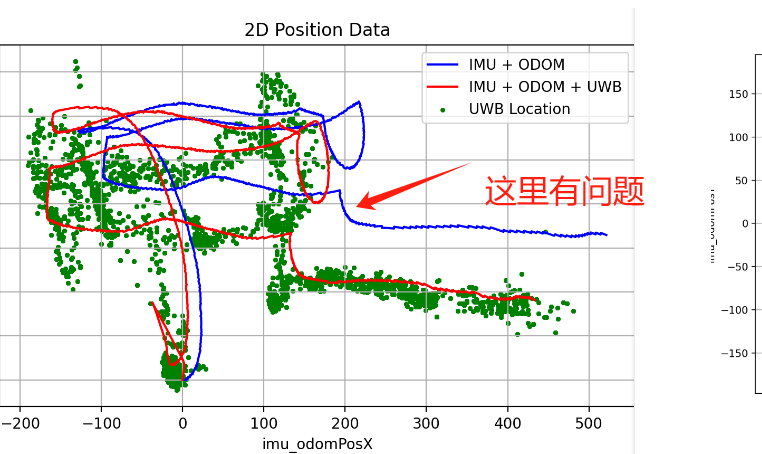
3.UWB草坪测试问题
在草坪环境里面跑UWB融合定位全覆盖,会出现异常情况。在下面箭头位置,全覆盖会失效错误。目前草坪UWB全覆盖有下面两个问题:
1、转弯处有额外的圈圈,怀疑是因为UWB放在车头导致转弯产生额外的偏移,引起全覆盖算法出现调整导致。
2、全覆盖异常问题:运行一段时间后,全覆盖出现异常导航
问题1解决方案:调整UWB基站的位置,放在两个轮子中间,重新设计银星机器人结构,减少摄像头遮挡。
问题 2解决方案:全覆盖的log采用文件存储方式,在关键节点记录全覆盖的log并保存,在复现bug的时候,通过log回推代码逻辑。
4.融合定位问题
目前融合定位存在下面两个问题:
1.初始收敛慢,缺少初始阶段快速收敛
2.缺少方向对准