1.5 KiB
1.5 KiB
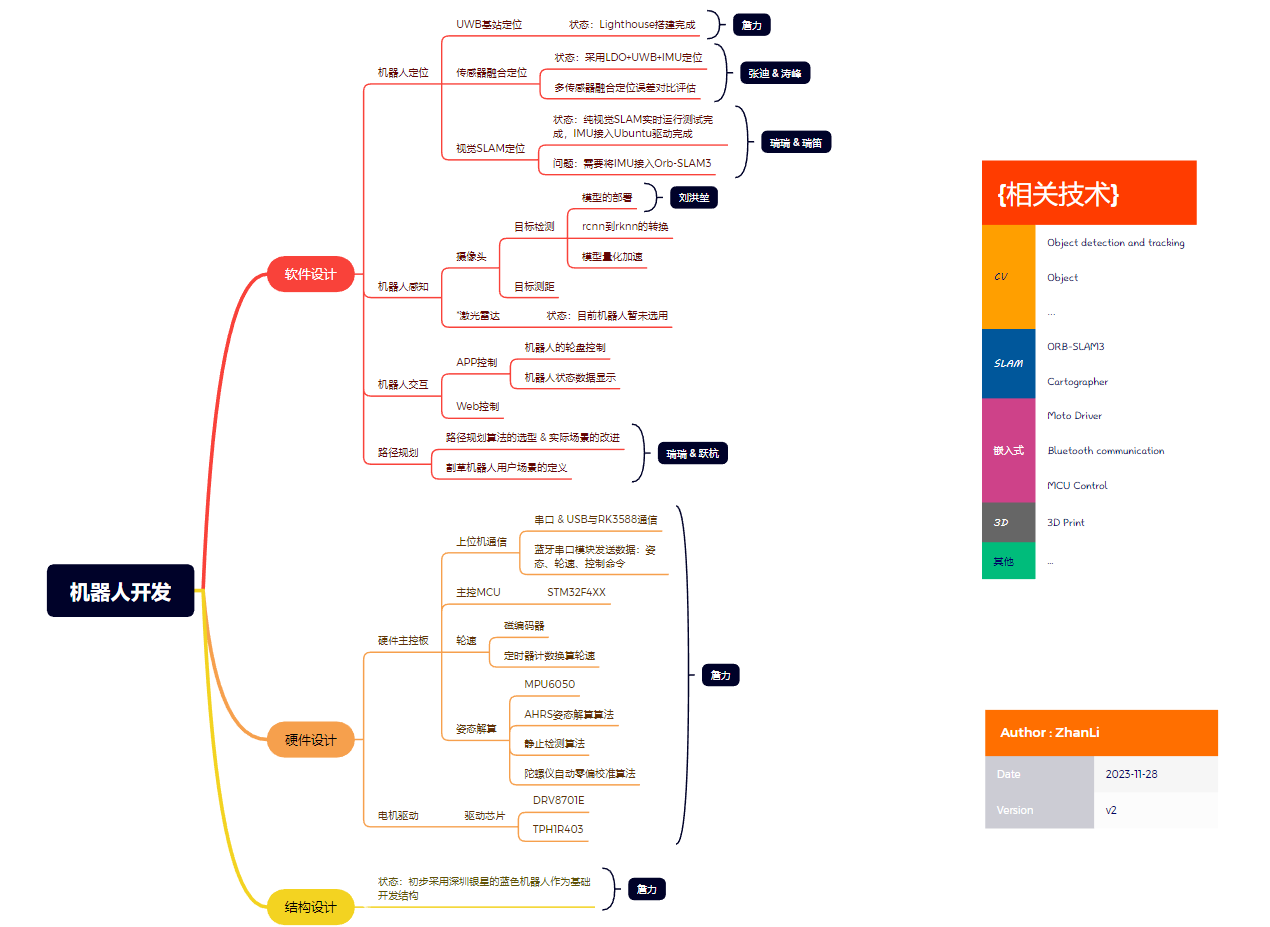
机器人开发规划和进度跟踪
2023-11-30 机器人开发状态更新
SLAM仓库:http://logzhan.ticp.io:30000/logzhan/ORB-SLAM3-UESTC
定位参考系统仓库:http://logzhan.ticp.io:30000/logzhan/LightHouse-UESTC
路径规划仓库:http://logzhan.ticp.io:30000/logzhan/PathPlanning-UESTC
机器人硬件设计仓库:http://logzhan.ticp.io:30000/logzhan/RobotDriver-UESTC
机器人控制APP仓库:http://logzhan.ticp.io:30000/logzhan/RobotApp-UESTC
一、 项目状态
1.1 最新进度说明
| 项目 | 状态和说明 | 负责人 | 状态 | 更新时间 |
|---|---|---|---|---|
| ORB-SLAM3采用实时图像和IMU测试 | 目前购买的IMU数据存在问题,IMU的Y轴数据存在异常。Linux下IMU的串口驱动程序不够完善。 | 李瑞瑞 | 进行中 | 2023-11-30 |
| 定位参考系统 | 采用HTC vive VR的激光定位系统用于评估机器人定位算法误差,文档和资料仓库路径 | 詹力 | 完成 | 2023-12-01 |
1.2 项目里程碑

二、项目开发规划