3.0 KiB
3.0 KiB
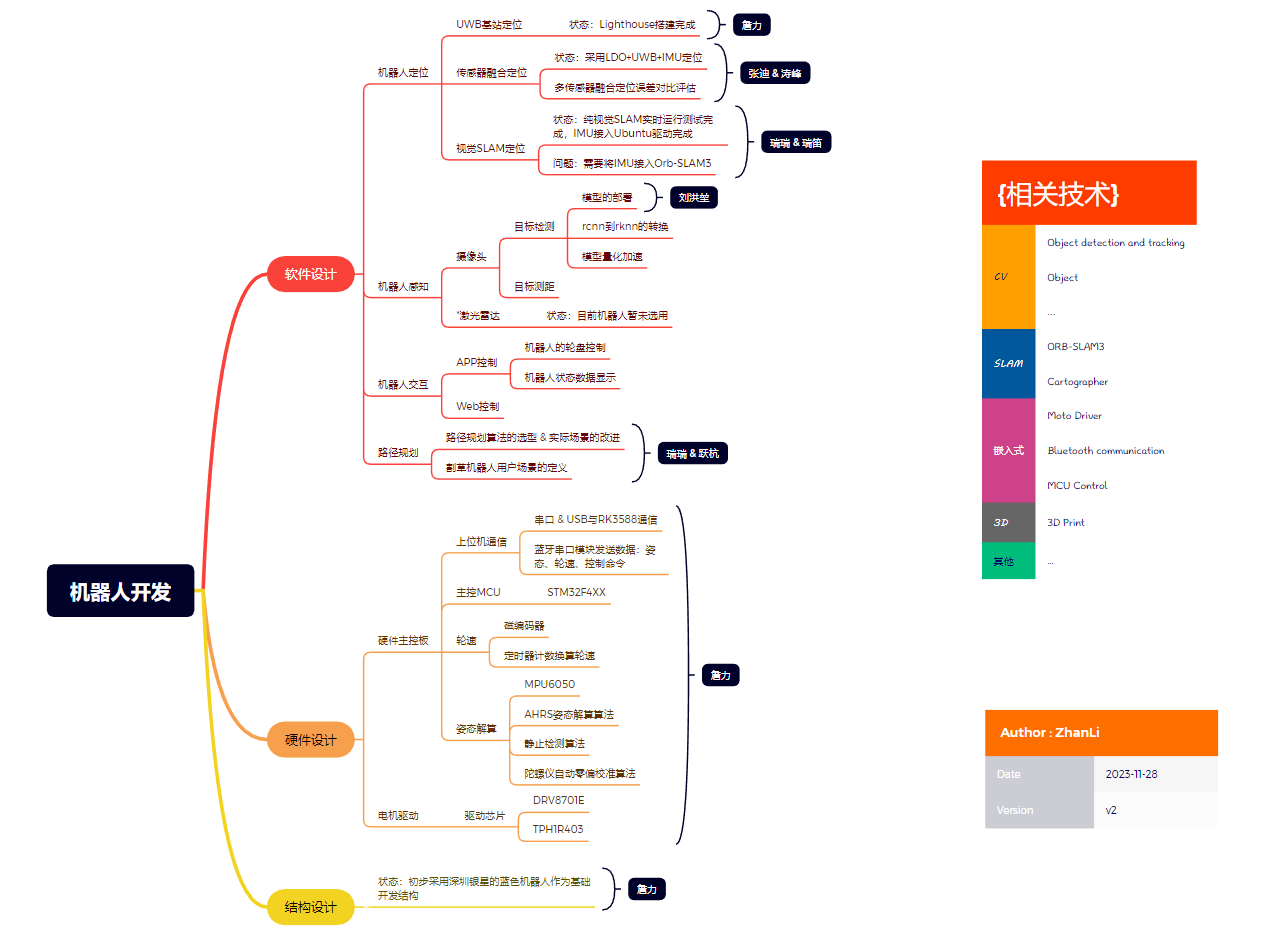
机器人开发规划和进度跟踪
2023-11-30 机器人开发状态更新
SLAM仓库:http://logzhan.ticp.io:30000/logzhan/ORB-SLAM3-UESTC
定位参考系统仓库:http://logzhan.ticp.io:30000/logzhan/LightHouse-UESTC
路径规划仓库:http://logzhan.ticp.io:30000/logzhan/PathPlanning-UESTC
机器人硬件设计仓库:http://logzhan.ticp.io:30000/logzhan/RobotDriver-UESTC
机器人控制APP仓库:http://logzhan.ticp.io:30000/logzhan/RobotApp-UESTC
割草机器人硬件厂商:https://cn.sunseekerpower.com/index.php?m=home&c=Lists&a=index&tid=81
一、 项目状态
1.1 最新进度说明
| 项目 | 状态和说明 | 负责人 | 状态 | 更新时间 |
|---|---|---|---|---|
| ORB-SLAM3采用实时图像和IMU测试 | 目前购买的IMU数据存在问题,IMU的Y轴数据存在异常。Linux下IMU的串口驱动程序不够完善。ORB-SLAM3没有实时接入摄像头和IMU的样例,需要修改适配。 | 李瑞瑞 | 进行中 | 2023-11-30 |
| ORB-SLAM3在RK3588上运行 | 需要观测ORB-SLAM3(纯摄像头、摄像头+IMU)对RK3588的CPU的占用情况,记录文档。 | — | ||
| 定位参考系统 | 采用HTC vive VR的激光定位系统用于评估机器人定位算法误差,文档和资料仓库路径 | 詹力 | 完成 | 2023-12-01 |
| 多平台可视化GUI系统(IOS、android、windows、linux) | 有GUI界面显示机器人的位置信息、检测边界信息、规划路径信息、电量信息、地图信息等。可以对机器人进行执行和控制。跨平台开发建议选择flutter. | — | ||
| 机器人硬件和结构搭建 | 已购买割草机器人,包含充电底座和机器人主体,12月2日发货,地址高研院10楼。 | 詹力 | 完成 |
1.2 项目里程碑

二、项目开发规划
三、机器人硬件搭建
3.1 机器人硬件
机器人的基础硬件采用Sunseeker的智能机器人。支持自动寻址充电和蓝牙&WIFI控制。目前已经找到公司的官网,卖家说可以通过app控制机器人操作,暂时还未联系厂商要求提供app。
3.1.1 外观和功能
 机器人正面和背面图
机器人正面和背面图
