forked from logzhan/RobotKernal-UESTC
243 lines
11 KiB
Markdown
243 lines
11 KiB
Markdown
|
|
# IAI Kinect2
|
|||
|
|
|
|||
|
|
## Maintainer
|
|||
|
|
|
|||
|
|
- [Thiemo Wiedemeyer](https://ai.uni-bremen.de/team/thiemo_wiedemeyer) <<wiedemeyer@cs.uni-bremen.de>>, [Institute for Artificial Intelligence](http://ai.uni-bremen.de/), University of Bremen
|
|||
|
|
|
|||
|
|
## Read this first
|
|||
|
|
|
|||
|
|
Please read this README and the ones of the individual components throughly before asking questions. We get a lot of repeated questions, so when you have a problem, we urge everyone to check the [github issues (including closed ones)](https://github.com/code-iai/iai_kinect2/issues?utf8=%E2%9C%93&q=is%3Aissue). Your issue is very likely discussed there already.
|
|||
|
|
|
|||
|
|
The goal of this project is to give you a driver and the tools needed to receive data from the Kinect-2 sensor, in a way useful for robotics. You will still need to know how to use ROS to make use of it. Please follow the [ROS tutorials](http://wiki.ros.org/ROS/Tutorials). You will also need to learn how to work with point-clouds, or depth-clouds, or images (computer vision) to do useful things with the data.
|
|||
|
|
|
|||
|
|
*Note:* ***Please use the GitHub issues*** *for questions and problems regarding the iai_kinect2 package and its components.* ***Do not write emails.***
|
|||
|
|
|
|||
|
|
## Table of contents
|
|||
|
|
- [Description](#description)
|
|||
|
|
- [FAQ](#faq)
|
|||
|
|
- [Dependencies](#dependencies)
|
|||
|
|
- [Install](#install)
|
|||
|
|
- [GPU acceleration](#gpu-acceleration)
|
|||
|
|
- [OpenCL with AMD](#opencl-with-amd)
|
|||
|
|
- [OpenCL/CUDA with Nvidia](#openclcuda-with-nvidia)
|
|||
|
|
- [OpenCL with Intel](#opencl-with-intel)
|
|||
|
|
- [Citation](#citation)
|
|||
|
|
- [Screenshots](#screenshots)
|
|||
|
|
|
|||
|
|
## Description
|
|||
|
|
|
|||
|
|
This is a collection of tools and libraries for a ROS Interface to the Kinect One (Kinect v2).
|
|||
|
|
|
|||
|
|
It contains:
|
|||
|
|
- [a calibration tool](kinect2_calibration) for calibrating the IR sensor of the Kinect One to the RGB sensor and the depth measurements
|
|||
|
|
- [a library](kinect2_registration) for depth registration with OpenCL support
|
|||
|
|
- [the bridge](kinect2_bridge) between [libfreenect2](https://github.com/OpenKinect/libfreenect2) and [ROS](http://www.ros.org/)
|
|||
|
|
- [a viewer](kinect2_viewer) for the images / point clouds
|
|||
|
|
|
|||
|
|
## FAQ
|
|||
|
|
|
|||
|
|
#### If I have any question or someting is not working, what should I do first?
|
|||
|
|
|
|||
|
|
First you should look at this FAQ and the [FAQ from libfreenect2](https://github.com/OpenKinect/libfreenect2#faq).
|
|||
|
|
Secondly, look at [issue page from libfreenect2](https://github.com/OpenKinect/libfreenect2/issues) and
|
|||
|
|
the [issue page of iai_kinect2](https://github.com/code-iai/iai_kinect2/issues) for similar issues and solutions.
|
|||
|
|
|
|||
|
|
#### Point clouds are not being published?
|
|||
|
|
|
|||
|
|
Point clouds are only published when the launch file is used. Make sure to start kinect2_bridge with `roslaunch kinect2_bridge kinect2_bridge.launch`.
|
|||
|
|
|
|||
|
|
#### Will it work with OpenCV 3.0
|
|||
|
|
|
|||
|
|
Short answer: No.
|
|||
|
|
|
|||
|
|
Long answer: Yes, it is possible to compile this package with OpenCV 3.0, but it will not work.
|
|||
|
|
This is because cv_bridge is used, which itself is compiled with OpenCV 2.4.x in ROS Indigo/Jade and
|
|||
|
|
linking against both OpenCV versions is not possible. Working support for OpenCV 3.0 might come with a future ROS release.
|
|||
|
|
|
|||
|
|
#### kinect2_bridge is not working / crashing, what is wrong?
|
|||
|
|
|
|||
|
|
There are many reasons why `kinect2_bridge` might not working. The first thing to find out whether the problem is related to `kinect2_bridge` or `libfreenect2`.
|
|||
|
|
A good tool for testing is `Protonect`, it is a binary located in `libfreenect2/build/bin/Protonect`.
|
|||
|
|
It uses libfreenect2 directly with a minimal dependency on other libraries, so it is a good tool for the first tests.
|
|||
|
|
|
|||
|
|
Execute:
|
|||
|
|
- `./Protonect gl` to test OpenGL support.
|
|||
|
|
- `./Protonect cl` to test OpenCL support.
|
|||
|
|
- `./Protonect cpu` to test CPU support.
|
|||
|
|
|
|||
|
|
Before running `kinect2_bridge` please make sure `Protonect` is working and showing color, depth and ir images.
|
|||
|
|
If some of them are black, than there is a problem not related to `kinect2_bridge` and you should look at the issues from the libfreenect2 GitHub page for help.
|
|||
|
|
|
|||
|
|
If one of them works, try out the one that worked with `kinect2_bridge`: `rosrun kinect2_bridge kinect2_bridge _depth_method:=<opengl|opencl|cpu>`.
|
|||
|
|
You can also change the registration method with `_reg_method:=<cpu|opencl>`.
|
|||
|
|
|
|||
|
|
#### Protonect works fine, but kinect2_bridge is still not working / crashing.
|
|||
|
|
|
|||
|
|
If that is the case, you have to make sure that `Protonect` uses the same version of `libfreenect2` as `kinect2_bridge` does.
|
|||
|
|
To do so, run `make` and `sudo make install` in the build folder again. And try out `kinect2_bridge` again.
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
cd libfreenect2/build
|
|||
|
|
make & sudo make install
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
Also make sure that you are not using OpenCV 3.0.
|
|||
|
|
|
|||
|
|
If it is still crashing, compile it in debug and run it with gdb:
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
cd <catkin_ws>
|
|||
|
|
catkin_make -DCMAKE_BUILD_TYPE="Debug"
|
|||
|
|
cd devel/lib/kinect2_bridge
|
|||
|
|
gdb kinect2_bridge
|
|||
|
|
# inside gdb: run until it crashes and do a backtrace
|
|||
|
|
run
|
|||
|
|
bt
|
|||
|
|
quit
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
Open an issue and post the problem description and the output from the backtrace (`bt`).
|
|||
|
|
|
|||
|
|
#### kinect2_bridge hangs and prints "waiting for clients to connect"
|
|||
|
|
|
|||
|
|
This is the normal behavior. 'kinect2_bridge' will only process data when clients are connected (ROS nodes listening to at least one of the topics).
|
|||
|
|
This saves CPU and GPU resources. As soon as you start the `kinect_viewer` or `rostopic hz` on one of the topics, processing should start.
|
|||
|
|
|
|||
|
|
#### rosdep: Cannot locate rosdep definition for [kinect2_bridge] or [kinect2_registration]
|
|||
|
|
|
|||
|
|
`rosdep` will output errors on not being able to locate `[kinect2_bridge]` and `[kinect2_registration]`.
|
|||
|
|
That is fine because they are all part of the iai_kinect2 package and `rosdep` does not know these packages.
|
|||
|
|
|
|||
|
|
#### Protonect or kinect2_bridge outputs [TransferPool::submit] failed to submit transfer
|
|||
|
|
|
|||
|
|
This indicates problems with the USB connection.
|
|||
|
|
|
|||
|
|
#### I still have an issue, what should I do?
|
|||
|
|
|
|||
|
|
First of all, check the issue pages on GitHub for similar issues, as they might contain solutions for them.
|
|||
|
|
By default you will only see the open issues, but if you click on `closed` you will the the ones solved. There is also a search field which helps to find similar issues.
|
|||
|
|
|
|||
|
|
If you found no solution in the issues, feel free to open a new issue for your problem. Please describe your problem in detail and provide error messages and log output.
|
|||
|
|
|
|||
|
|
## Dependencies
|
|||
|
|
|
|||
|
|
- ROS Hydro/Indigo
|
|||
|
|
- OpenCV (2.4.x, using the one from the official Ubuntu repositories is recommended)
|
|||
|
|
- PCL (1.7.x, using the one from the official Ubuntu repositories is recommended)
|
|||
|
|
- Eigen (optional, but recommended)
|
|||
|
|
- OpenCL (optional, but recommended)
|
|||
|
|
- [libfreenect2](https://github.com/OpenKinect/libfreenect2) (>= v0.2.0, for stability checkout the latest stable release)
|
|||
|
|
|
|||
|
|
## Install
|
|||
|
|
|
|||
|
|
1. Install the ROS. [Instructions for Ubuntu 14.04](http://wiki.ros.org/indigo/Installation/Ubuntu)
|
|||
|
|
2. [Setup your ROS environment](http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment)
|
|||
|
|
3. Install [libfreenect2](https://github.com/OpenKinect/libfreenect2):
|
|||
|
|
|
|||
|
|
Follow [the instructions](https://github.com/OpenKinect/libfreenect2#debianubuntu-1404) and enable C++11 by using `cmake .. -DENABLE_CXX11=ON` instead of `cmake ..`. If you are compiling libfreenect2 with CUDA, use `cmake .. -DENABLE_CXX11=ON -DCUDA_PROPAGATE_HOST_FLAGS=off`.
|
|||
|
|
|
|||
|
|
If something is not working, check out the latest stable release, for example `git checkout v0.2.0`.
|
|||
|
|
|
|||
|
|
4. Clone this repository into your catkin workspace, install the dependencies and build it:
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
cd ~/catkin_ws/src/
|
|||
|
|
git clone https://github.com/code-iai/iai_kinect2.git
|
|||
|
|
cd iai_kinect2
|
|||
|
|
rosdep install -r --from-paths .
|
|||
|
|
cd ~/catkin_ws
|
|||
|
|
catkin_make -DCMAKE_BUILD_TYPE="Release"
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
*Note: `rosdep` will output errors on not being able to locate `[kinect2_bridge]` and `[depth_registration]`.
|
|||
|
|
That is fine because they are all part of the iai_kinect2 package and `rosdep` does not know these packages.*
|
|||
|
|
|
|||
|
|
*Note: If you installed libfreenect2 somewhere else than in `$HOME/freenect2` or a standard location like `/usr/local`
|
|||
|
|
you have to specify the path to it by adding `-Dfreenect2_DIR=path_to_freenect2/lib/cmake/freenect2` to `catkin_make`.*
|
|||
|
|
|
|||
|
|
5. Connect your sensor and run `kinect2_bridge`:
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
roslaunch kinect2_bridge kinect2_bridge.launch
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
6. Calibrate your sensor using the `kinect2_calibration`. [Further details](kinect2_calibration#calibrating-the-kinect-one)
|
|||
|
|
7. Add the calibration files to the `kinect2_bridge/data/<serialnumber>` folder. [Further details](kinect2_bridge#first-steps)
|
|||
|
|
8. Restart `kinect2_bridge` and view the results using `rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud`.
|
|||
|
|
|
|||
|
|
## GPU acceleration
|
|||
|
|
|
|||
|
|
### OpenCL with AMD
|
|||
|
|
|
|||
|
|
Install the latest version of the AMD Catalyst drivers from https://support.amd.com and follow the instructions. Also install `opencl-headers`.
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
sudo apt-get install opencl-headers
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
### OpenCL/CUDA with Nvidia
|
|||
|
|
|
|||
|
|
Go to [developer.nvidia.com/cuda-downloads](https://developer.nvidia.com/cuda-downloads) and select `linux`, `x86_64`, `Ubuntu`, `14.04`, `deb(network)`.
|
|||
|
|
Download the file and follow the instructions. Also install `nvidia-modprobe` and `opencl-headers`.
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
sudo apt-get install nvidia-modprobe opencl-headers
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
You also need to add CUDA paths to the system environment, add these lines to you `~/.bashrc`:
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
export LD_LIBRARY_PATH="/usr/local/cuda/lib64:${LD_LIBRARY_PATH}"
|
|||
|
|
export PATH="/usr/local/cuda/bin:${PATH}"
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
A system-wide configuration of the libary path can be created with the following commands:
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
echo "/usr/local/cuda/lib64" | sudo tee /etc/ld.so.conf.d/cuda.conf
|
|||
|
|
sudo ldconfig
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
### OpenCL with Intel
|
|||
|
|
|
|||
|
|
You can either install a binary package from a PPA like [ppa:floe/beignet](https://launchpad.net/~floe/+archive/ubuntu/beignet), or build beignet yourself.
|
|||
|
|
It's recommended to use the binary from the PPA.
|
|||
|
|
|
|||
|
|
```bash
|
|||
|
|
sudo add-apt-repository ppa:floe/beignet && sudo apt-get update
|
|||
|
|
sudo apt-get install beignet beignet-dev opencl-headers
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
## Citation
|
|||
|
|
|
|||
|
|
If you used `iai_kinect2` for your work, please cite it.
|
|||
|
|
|
|||
|
|
```tex
|
|||
|
|
@misc{iai_kinect2,
|
|||
|
|
author = {Wiedemeyer, Thiemo},
|
|||
|
|
title = {{IAI Kinect2}},
|
|||
|
|
organization = {Institute for Artificial Intelligence},
|
|||
|
|
address = {University Bremen},
|
|||
|
|
year = {2014 -- 2015},
|
|||
|
|
howpublished = {\url{https://github.com/code-iai/iai\_kinect2}},
|
|||
|
|
note = {Accessed June 12, 2015}
|
|||
|
|
}
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
The result should look something similar to this (may depend on the bibliography style used):
|
|||
|
|
|
|||
|
|
```
|
|||
|
|
T. Wiedemeyer, “IAI Kinect2,” https://github.com/code-iai/iai_kinect2,
|
|||
|
|
Institute for Artificial Intelligence, University Bremen, 2014 – 2015,
|
|||
|
|
accessed June 12, 2015.
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
## Screenshots
|
|||
|
|
|
|||
|
|
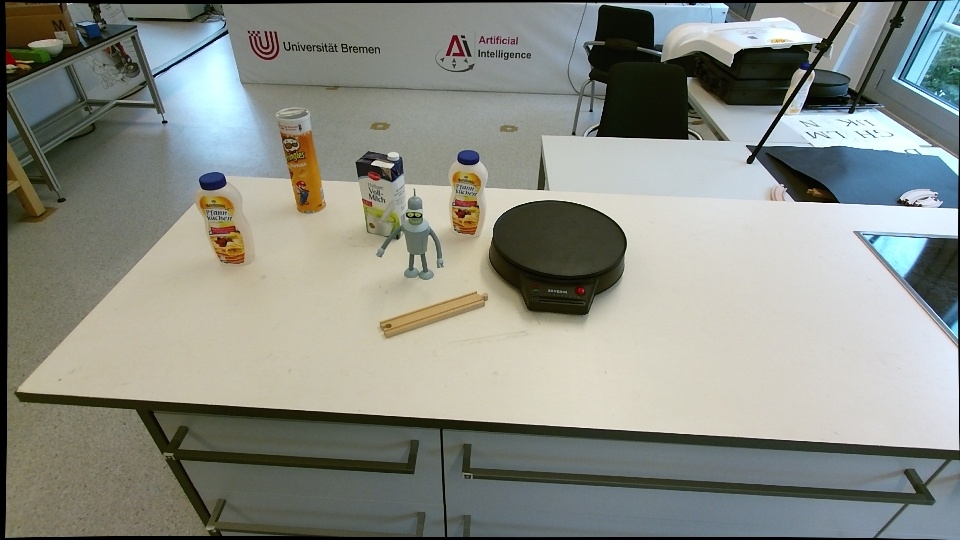
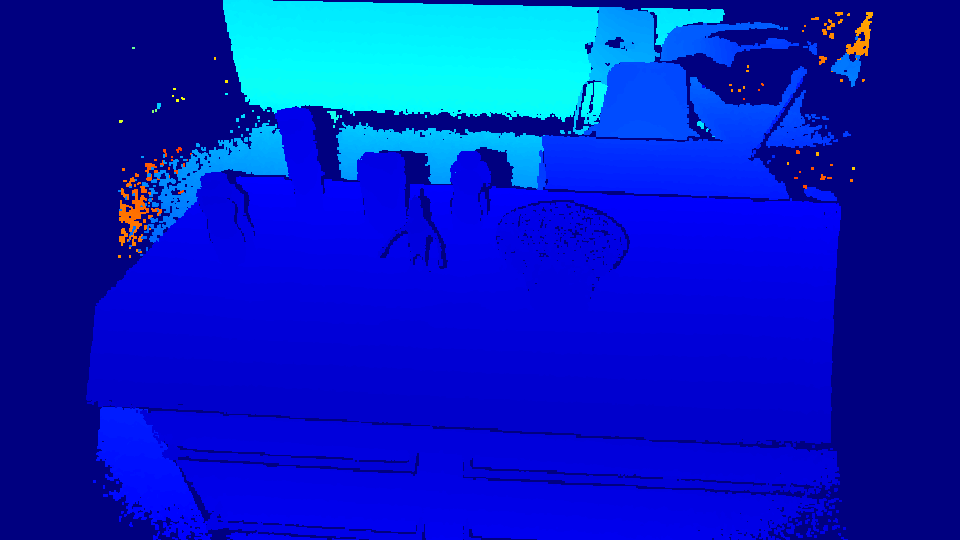
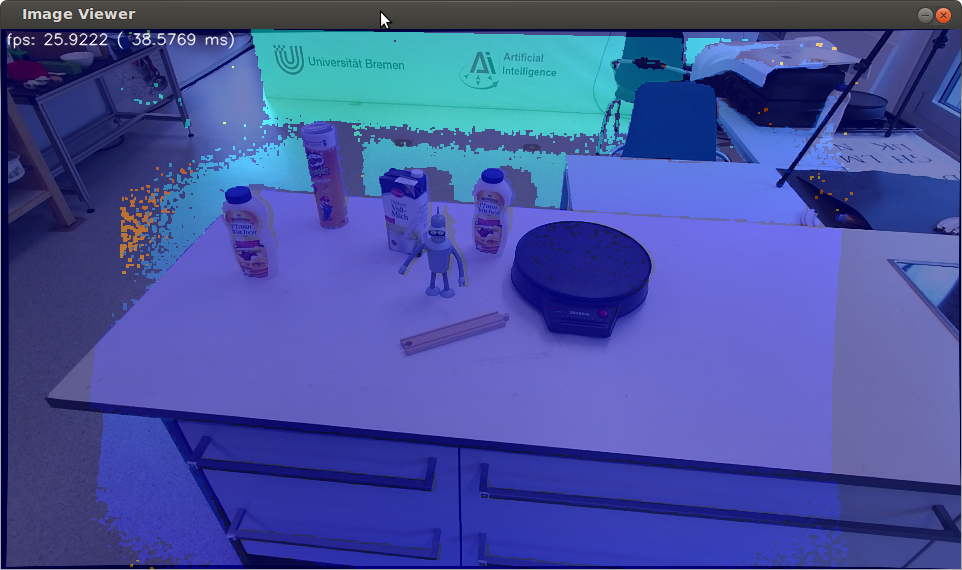
Here are some screenshots from our toolkit:
|
|||
|
|
|
|||
|
|
|
|||
|
|

|
|||
|
|
|
|||
|
|
|