2.7 KiB
2.7 KiB
4.17组会
上周工作内容:
1. python文件实现按键控制启动launch文件,实现割草机各个功能
a:摄像头 b:导航 c:客户端 d:服务端
出现的问题:想要实现按键退出 ,识别按键后并没有终止运行;当关闭终端时并没有停止运行程序;由于启动各个launch会在终端打印调试信息,信息刷新很快不能识别到按键的输入。
2. 摄像头设备号总是发生变化
由于r是全局变量,从主函数中读取设备号参数较麻烦。所以更改ranging类的初始化方式。在初始化过程中尝试打开设备0,如果打开设备失败则打开设备40.
3. 草地测试割草机定位和避障效果
下周工作内容
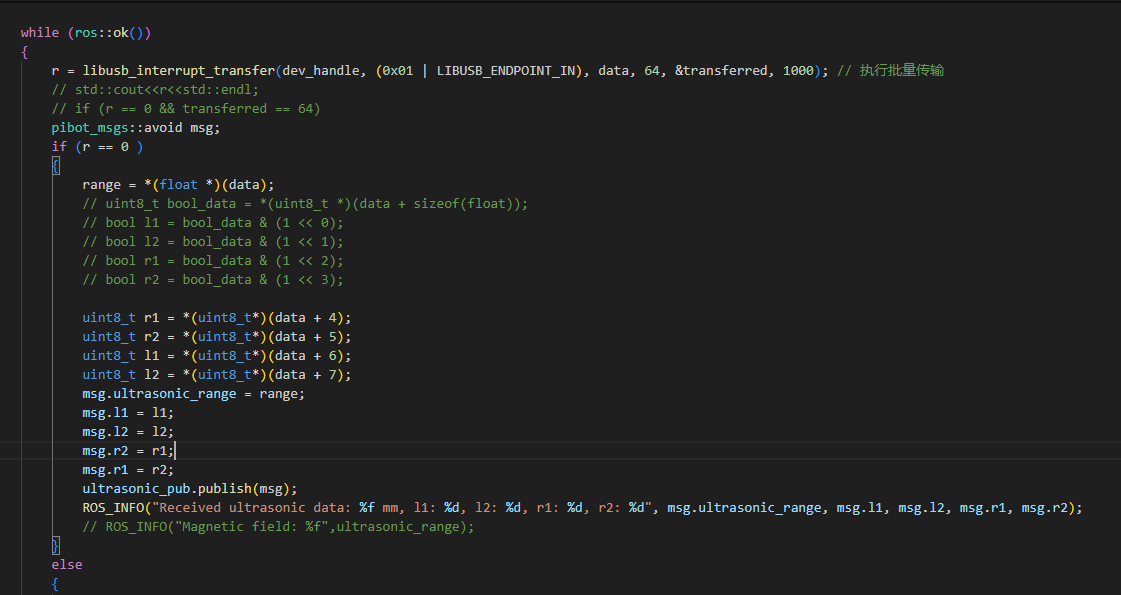
1. 将usb-hid改为ros工程,gcc改为CMake,读取超声波数据。
2.在3588上发送信号给标签,通知其发送手持标签的定位数据还是割草机的定位数据。
4.24组会
为了解决串口冲突,使用usb-hid通过识别pid、vid。
usb-hid 非root用户在linux下使用串口权限不够。
解决:需要设置udev规则来实现。
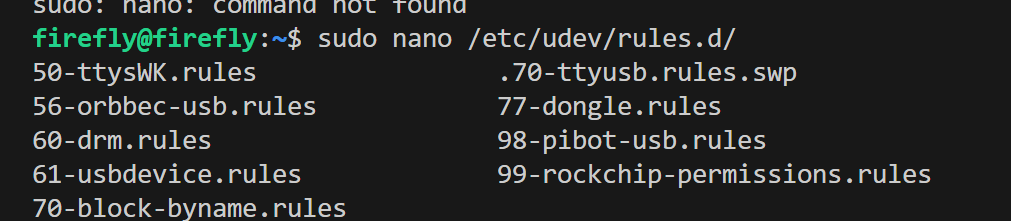
通常情况下,udev规则文件的命名规则是按照数字和规则名称的顺序来加载的。数字越小的规则文件会先被加载,而数字越大的规则文件会后被加载。因此,可以选择一个数字较大的数字作为规则文件的名称,以确保在其他规则文件之后加载。
-
创建规则文件
sudo gedit /etc/udev/rules.d/99-usb-serial.rules -
写入规则
SUBSYSTEM=="usb" ATTRS{idVendor}=="YOUR_VENDOR_ID", ATTRS{idProduct}=="YOUR_PRODUCT_ID", MODE:="0777"
-
重新加载udev规则,以使更改生效
sudo udevadm control --reload-rules sudo udevadm trigger
通过发送指令给车上的标签,发送0x00启动的是手持标签的定位,发送0x01启动的是车自身的定位,以实现手持标签划范围
tmp_char[0] = 0x00;
r = libusb_interrupt_transfer(dev_handle, (0x01 | LIBUSB_ENDPOINT_OUT), tmp_char, 64, &transferred, 1000);
切换模式时:当从手持标签模式切换到车自身模式时,需要将手持标签断开,否则会干扰定位数据,收上来的数据是乱的。
下周工作内容
联合调试:用手持标签画的边界执行全覆盖。
超声波、碰撞数据接入
5.28 组会
1. 将超声波和碰撞模块数据接入并转化为ros消息格式,以供避障使用
-
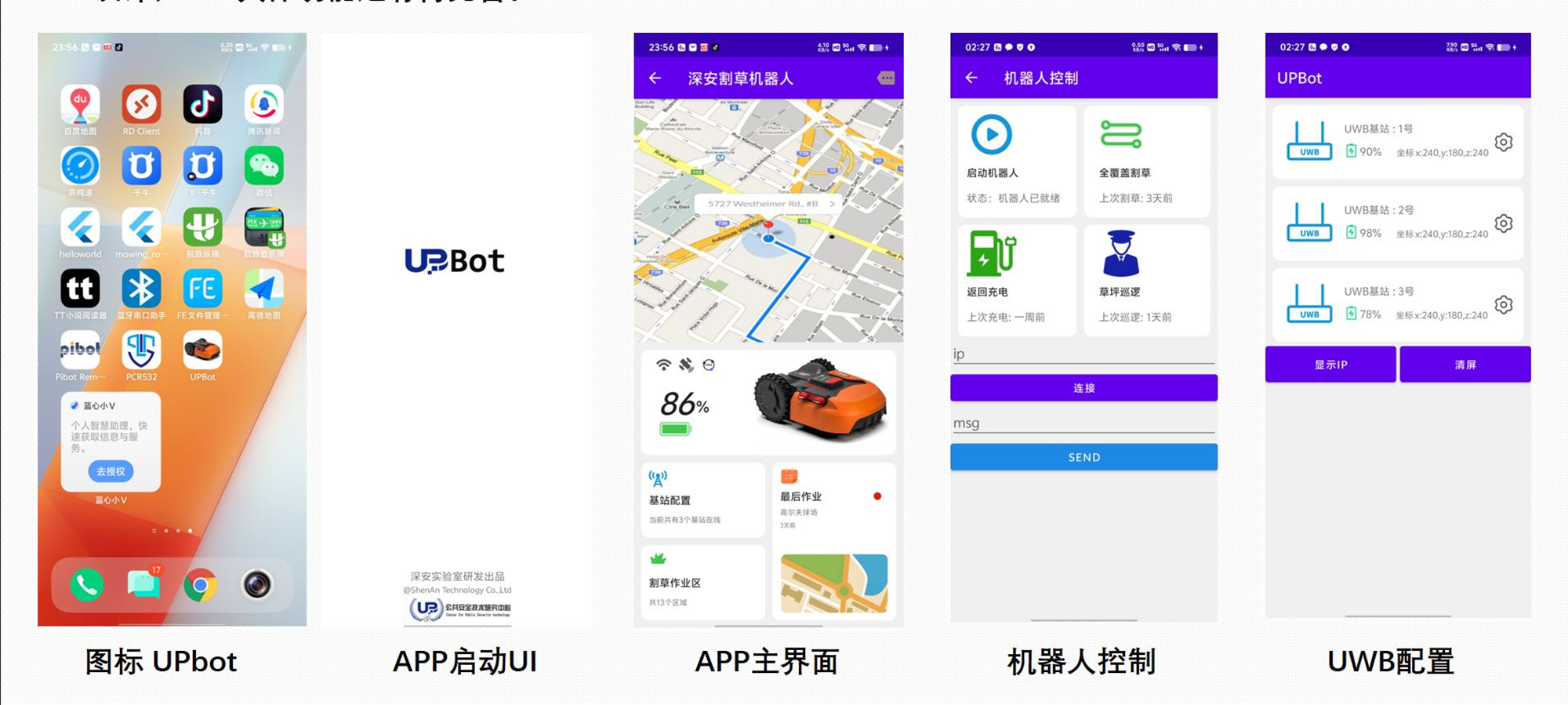
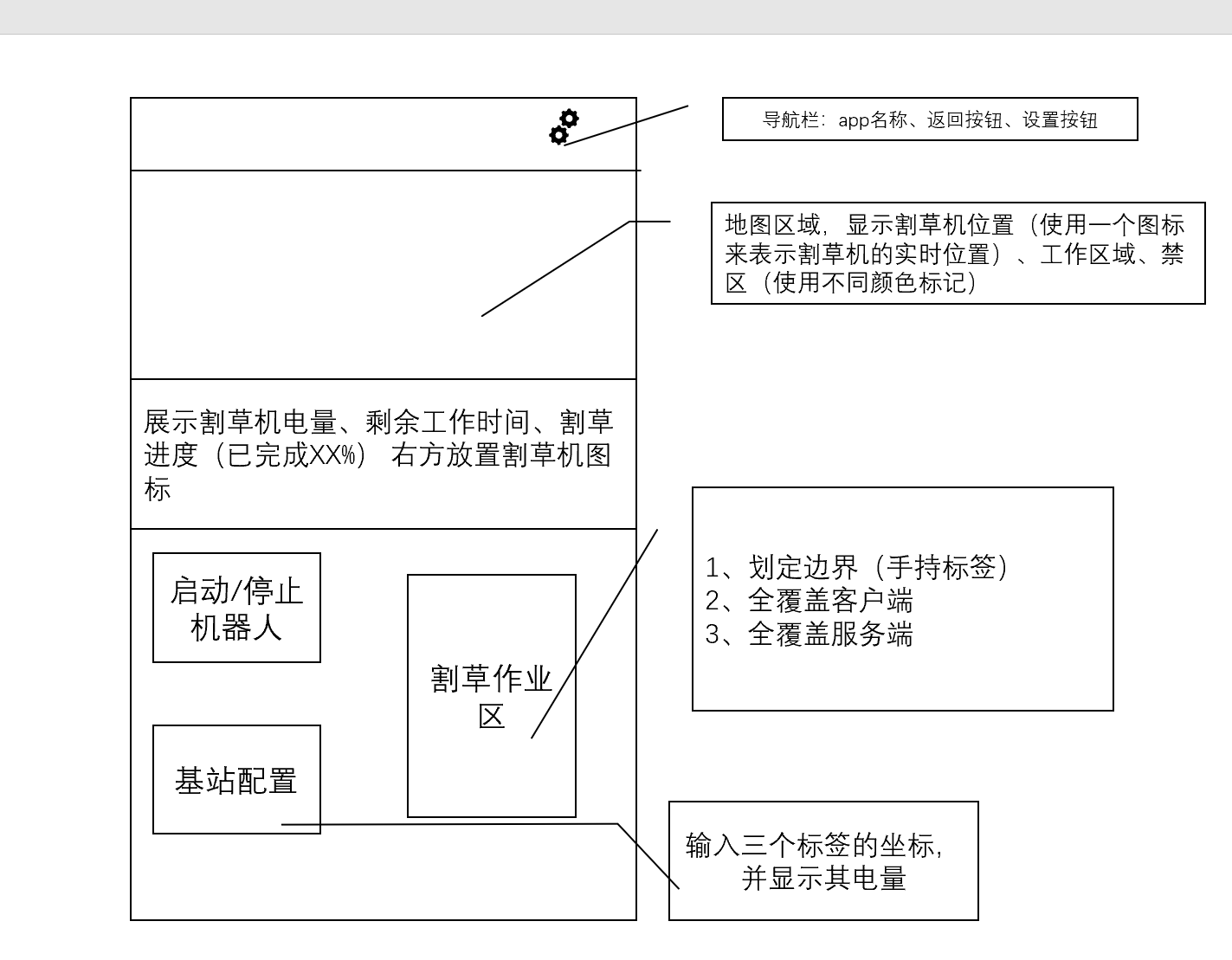
app测试